| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
mato1111
Član

Pridružen-a: Pet 28 Dec 2012 14:42
Prispevkov: 612
Aktiv.: 4.45
Kraj: Vrhnika
|
 Objavljeno: Sob Jan 21, 2017 8:06 pm Naslov sporočila: Gibanje robotske roke Objavljeno: Sob Jan 21, 2017 8:06 pm Naslov sporočila: Gibanje robotske roke |
 |
|
Pozdravljeni
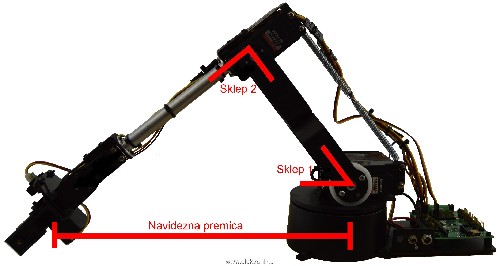
Zanima me ce bi mi lahko kdo ("po kmečko") pojasnil kako pri robotski roki preracunas gibanje sklepov v ravni premik v mm. Recimo da imam 2 sklepa in hocem z robotom naredit navidezno premico. Slika za pojasnilo.
| Opis: |
|
| Velikost datoteke: |
245.7 KB |
| Pogledana: |
6 krat |
|
|
|
| Nazaj na vrh |
|
 |
solomojster
Član
Pridružen-a: Tor 18 Maj 2010 12:26
Prispevkov: 845
Aktiv.: 4.99
Kraj: NOVA GORICA
|
| Objavljeno: Ned Jan 22, 2017 10:26 am Naslov sporočila: |
|
|
Zanimivo vprašanje. Oba kota se med delovanjam istočasno spreminjata. Če imaš skico ali model poznaš začetne kote in končne kote. Potem pa gre še za uskladitev hitrosti obeh motorjev. Zato da potuje roka linearno.
Vem da nisem ogovoril to kar sprašuješ. 
|
|
| Nazaj na vrh |
|
|
mato1111
Član
Pridružen-a: Pet 28 Dec 2012 14:42
Prispevkov: 612
Aktiv.: 4.45
Kraj: Vrhnika
|
| Objavljeno: Ned Jan 22, 2017 11:12 am Naslov sporočila: |
|
|
| V bistvu me zanima ravno to kako se morata spreminjati oba kota da naredi linearni premik.
|
|
| Nazaj na vrh |
|
|
Branez
Moderator


Pridružen-a: Pon 14 Apr 2003 7:21
Prispevkov: 7770
Aktiv.: 34.88
Kraj: Koprivnica HR
|
| Objavljeno: Ned Jan 22, 2017 11:27 am Naslov sporočila: |
|
|
Mogoče si boš s tem kaj pomagal. Nekaj podobnega, a za začetek koristno. To so izračuni za gibanje v tem projektu,
_________________
The true sign of intelligence is not knowledge but imagination.
Creativity is intelligence having fun!
Albert Einstein |
|
| Nazaj na vrh |
|
|
qwertz
Član

Pridružen-a: Ned 01 Jun 2008 11:57
Prispevkov: 2541
Aktiv.: 13.14
Kraj: Vrhnika
|
|
| Nazaj na vrh |
|
|
lipa
Član
Pridružen-a: Ned 27 Sep 2009 9:39
Prispevkov: 734
Aktiv.: 4.14
Kraj: Lipa Beltinci
|
| Objavljeno: Pon Jan 23, 2017 12:59 am Naslov sporočila: |
|
|
Sem si zapomnil od enega profesorja na feri, citiram po spominu; Z takimi hudimi formulami strašimo poredne študende.
Z večjim številom sklepov kompliciranost raste do onemoglosti.
_________________
Lep pozdrav!
Boris Z. |
|
| Nazaj na vrh |
|
|
solomojster
Član
Pridružen-a: Tor 18 Maj 2010 12:26
Prispevkov: 845
Aktiv.: 4.99
Kraj: NOVA GORICA
|
| Objavljeno: Pon Jan 23, 2017 7:30 am Naslov sporočila: |
|
|
Kljub temu da premik ne bi bil čisto linearen bi poskusil takole;
S pomočjo skice ali pa kotomera na roki ,bi ugotovil koliko stopinj znaša delovni kot sklepa 1 in koliko stopinj sklepa 2.
Potem pa malce experimentiral z hitrostjo in koraki....
// Tell servo to go to 180 degrees, stepping by two degrees
for(position = 0; position < 180; position += 2)
{
servo1.write(position); // Move to next position
delay(20); // Short pause to allow it to move
}
// Tell servo to go to 0 degrees, stepping by one degree
for(position = 180; position >= 0; position -= 1)
{
servo1.write(position); // Move to next position
delay(20); // Short pause to allow it to move
}
}
Malo bolj po "kmečko".

|
|
| Nazaj na vrh |
|
|
lucca brassi
Član

Pridružen-a: Ned 01 Feb 2004 12:46
Prispevkov: 4049
Aktiv.: 18.18
Kraj: KOČEVJE
|
|
| Nazaj na vrh |
|
|
dragoon
Član

Pridružen-a: Čet 03 Maj 2007 21:51
Prispevkov: 452
Aktiv.: 2.19
Kraj: Trojane
|
| Objavljeno: Pon Jan 23, 2017 11:37 am Naslov sporočila: |
|
|
po kmečko ne bo šlo, raketna znanost pa tudi ni.
Laboratorij, ki ga je linkal qwertz ima en lušten učbenik z naslovom "Robotika" (Bajd, Mihelj), kjer je to dokaj enostavno razloženo v par poglavjih v sloveščini. Učbenik kupiš za male pare v avli FE. Če boš guglal probaj iskat "robot arm inverse kinematics".
_________________
LP, Mitja |
|
| Nazaj na vrh |
|
|
Riven
Član

Pridružen-a: Ned 16 Dec 2012 18:33
Prispevkov: 194
Aktiv.: 1.41
Kraj: Vojnik
|
| Objavljeno: Pon Jan 23, 2017 1:06 pm Naslov sporočila: |
|
|
Neka gromozanska znanost ni.
Gre za to da se računa inverzna kinematika. Vbistvu so matrike z določenimi vrednostni in koti posameznih osi.
Smo računali na roko na FERIju in je že za 3osnega robota prišlo par strani dolg "račun" z matrikami.
Je pa tega ogromno na spletu (youtube Stanford) tako da tople vode ni za odkrivat. Je pa res da moraš poznati osnove robotike in malo znanja o kartezičnem/krogelnem/valjnem koordinatnem sistemu in kako prehajati iz enega koordiantnega sistema v drugega. Da ne govorim o trigeometričnih funkcijah itd.
|
|
| Nazaj na vrh |
|
|
šknenad
Neznanec

Pridružen-a: Pon 05 Dec 2016 13:36
Prispevkov: 4
Aktiv.: 0.04
|
| Objavljeno: Sob Feb 04, 2017 11:06 am Naslov sporočila: |
|
|
upam da ti bo kaj pomagalo
| Opis: |
|

Download |
| Ime datoteke: |
d kinmatika in dinamika robota.pdf |
| Velikost datoteke: |
2.03 MB |
| Downloadano: |
29 krat |
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|



