|
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
program_er
Član


Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
 Objavljeno: Pet Feb 27, 2009 6:36 pm Naslov sporočila: Sledibot Objavljeno: Pet Feb 27, 2009 6:36 pm Naslov sporočila: Sledibot |
 |
|
Pozdravljeni!
Mogoče kdo od vas pozna tekmovanje ROBOsled, ki poteka v MB na SERŠu (mogoče še kje drugje) in je letos 17. marca ob 13.00 uri v učilnici B04.  Malo informacij. Malo informacij. 
No, lani sem na tem tekmovanju bil 1. in letos spet tekmujem. Vsi slediboti (roboti ki sledijo ki sledijo črni črti) so v principu enaki, enak KIT, enaka navodila... Jaz sem pač zmagal na račun velikih koles in par zamenjanih uporov, da je bolj gnalo servote
Ampak samo delovanje oz. premikanje teh sledibotov mi gre skrajno na živce! Premikajo se zgolj z obračanjem v levo in desno. Imajo 1 fotoupor in ukaz npr: če je črno pojdi levo, če je belo pojdi desno. In potem se on premika z levo, desno, levo, desno. Vedno eno kolo stoji! No, v ovinkih še nekako gre, ko pa robot pride na ravnino pa je to čisto blesavo! In se ziba sem in tja in tako premaguje ravno črto.
No, jaz sem si to zamislil drugače. Ker je edina omejitev to, da je robot narejen doma, mi ni problem narediti enega sprogramiranega. No, princip moje ga bil tak: pelji naravnost s polno hitrostjo, ko pa določen senzor zazna črno, pa samo bolj ali manj upočasni tisto kolo. Tako bi robot na ravninah lahko vozil s skoraj polno hitrostjo. Srce bo ATmega32, ki jo bom programiral z Bascom-AVR. Kodo objavim po tekmovanju  Če bo koliko-toliko izpadlo mogoče celo objavim med projekti. Če bo koliko-toliko izpadlo mogoče celo objavim med projekti.
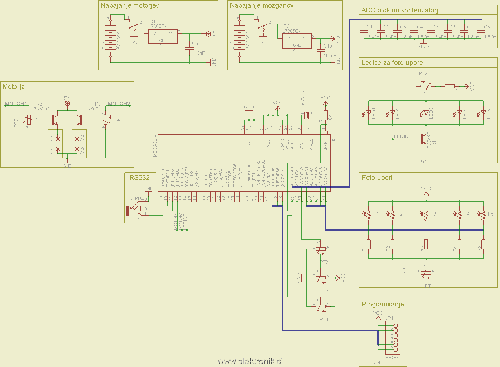
Zdaj sem začel delati shemo v Eaglu, pa sem trenutno prišel do stanja na sliki. Vsaka LEDica spada k svojemu fotouporu, s katerim merim odbito svetlobo preko ADCja. Pa vsakič, ko bom kaj naredil zraven (ko se bo kaj večjega poznalo) bom prilepil novo sliko. Prosil bi, da shemo proti podokumentirate, ker jaz se še ne spoznam na to tako (to je moj prvi resnejši projekt) in velikokrat naredim nekaj preenostavno (in potem manjka kaki pomemben element ali pa kaj podobnega) ali pa prezakomplicirano. Na shemo še pridejo tipke in nekaj tranzistorjev (ali pa čip) za poganjanje motorjev ter nekaj LEDic (na tekmovanju se ocenjuje tudi "lepota" ter inovativnost izdelave robota).
| Opis: |
|
| Velikost datoteke: |
22.84 KB |
| Pogledana: |
91 krat |
|
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
|
|
| Nazaj na vrh |
|
 |
eddie
Član
Pridružen-a: Sre 10 Dec 2003 21:02
Prispevkov: 723
Aktiv.: 3.05
Kraj: Severna primorska
|
| Objavljeno: Pet Feb 27, 2009 7:54 pm Naslov sporočila: |
|
|
podokumentirate -> pokomentirate!
Ideja uporabiti bananico za rs232 se zdi kar dobra!
Bi se dalo kdaj uporabiti..
Lp
|
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
| Objavljeno: Pet Feb 27, 2009 8:07 pm Naslov sporočila: |
|
|
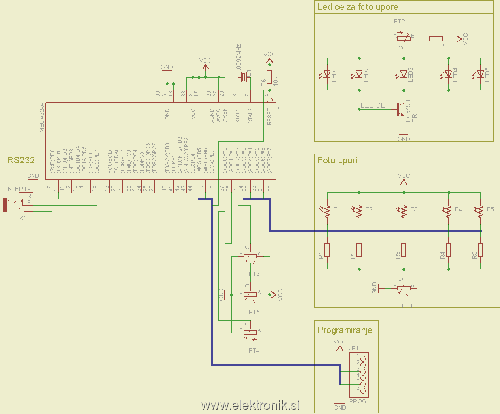
Ja ker imam USB - Serial data kabel, ki ima na koncu 3,5mm jack. V bistvu je bil zraven merilnika sladkorja (sladkorna bolezen) za prenos meritev in podatkov na računalnik. Pa sem si rekel, ej, to pa je praktično. Zdaj skoraj vsepovsod kjer rabim RS232 dam jack in je! Sila enostavno in hitro ter majhno!
V primeru Sledibota pa je jack s stikalom - to pa zato, da po nepotrebnem ne pošiljam meritev (rezultate ADC) na RS232 oz je lahko ta izkjučen. Jaz samo pregledujem stanje stikala in ko zaznam, da je vkjučen kabel, začnem pošiljati podatke.
| Opis: |
|
| Velikost datoteke: |
11 KB |
| Pogledana: |
9531 krat |

|
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
|
|
| Nazaj na vrh |
|
|
eddie
Član
Pridružen-a: Sre 10 Dec 2003 21:02
Prispevkov: 723
Aktiv.: 3.05
Kraj: Severna primorska
|
| Objavljeno: Pet Feb 27, 2009 9:16 pm Naslov sporočila: |
|
|
Super!

Lp
|
|
| Nazaj na vrh |
|
|
Obelix
Član
Pridružen-a: Pon 19 Maj 2008 13:59
Prispevkov: 1881
Aktiv.: 9.03
Kraj: Maribor
|
| Objavljeno: Sob Feb 28, 2009 11:04 am Naslov sporočila: Sledibot |
|
|
Lepo.
Poglej si tega
Atmega32 je mogoče malo "overkill" za sledibota. Atmega8 bi zadostoval.
Ampak to je samo moje mnenje.
Lep pozdrav, Andrej
|
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
| Objavljeno: Sob Feb 28, 2009 2:44 pm Naslov sporočila: |
|
|
Vem, da bil bil mega8 čisto dovolj, samo bi bil že bolj na kratko s pini. Jaz sem rad bolj "flegma", meg32 pa imam tudi še 4 v SMD obliki in jih moram nekje porabit.
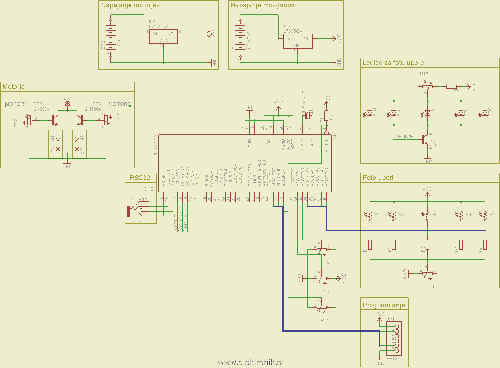
Do zdaj nisem imel veliko časa, zato sem dodal samo napajanje in napajanje motorjev. Bo 2N3904 zdržal tok motorčka v servotu? Pa jaz sem pač po svoje rešil kontroliranje hitrosti motorjev, ali bo ta način deloval? Imate boljši predlog? Pa glede napajanja, nisem tako vešč s temi regulatorji, zdi se mi, da manjka nekaj kondenzatorjev, pa nevem kakšne in kje bi jih dodal (kondenzatorji in upori so vsi v SMD obliki)... Razlog za to, da sem za napajanje motorjev dal svojo baterijo je ta, da motor ob zagonu pobere malo večji tok in lahko povzroči kakšen reset čipa ali pa napačno meritev, česar si ne želim. Pa tudi boljše je, da je "pamet" ločena.
| Opis: |
|
| Velikost datoteke: |
38.29 KB |
| Pogledana: |
41 krat |
|
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
Nazadnje urejal/a program_er Sob Jul 04, 2009 5:03 pm; skupaj popravljeno 2 krat |
|
| Nazaj na vrh |
|
|
dkone
Član
Pridružen-a: Sre 07 Mar 2007 18:53
Prispevkov: 2116
Aktiv.: 9.50
Kraj: Krško
|
| Objavljeno: Sob Feb 28, 2009 2:53 pm Naslov sporočila: |
|
|
Priporočam ti še blokirne kondezatorje na ADC vhodih. Včasih še kako pomagajo Sploh pa ker imaš še zraven motorje,ki se obnašajo kot induktivno breme.
Drugače bo pa lep izdelek
_________________
Denis |
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
| Objavljeno: Sob Feb 28, 2009 3:01 pm Naslov sporočila: |
|
|
Blokirne kondenzatorje?  (kam se to veže?) (kam se to veže?)
Pa ravnokar sem še nekaj videl: Tisti potenciometer PT1 mi nič ne pomaga. Mislil sem ga imeti zato, da nebi rabil programsko nastavljati, če svetloba (programska meja med črno in belo) nebi štimala. Ampak: fotoupor F3 gre po črni črti, vsi ostali pa po belem. In če bi jaz potem zasukal potenciometer, bi bil na istem, kajti vsem bi se zvišala ali znižala vrednost, ne samo belim in ne samo črnemu. Bom pa ga vseeno pustil, ker zdaj še ne vem, kakšne vrednosti morajo biti upori in bo zato, da bom z njim nastavljal neko sredino ADC vrednosti.
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
Nazadnje urejal/a program_er Sob Jul 04, 2009 5:02 pm; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
dkone
Član
Pridružen-a: Sre 07 Mar 2007 18:53
Prispevkov: 2116
Aktiv.: 9.50
Kraj: Krško
|
| Objavljeno: Sob Feb 28, 2009 3:08 pm Naslov sporočila: |
|
|
Na vsak pin od ADC-ja,veži 100nF kondezator proti masi. Temu se pravi blokirni kondezator,proti motnjam.
_________________
Denis |
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
|
| Nazaj na vrh |
|
|
dkone
Član
Pridružen-a: Sre 07 Mar 2007 18:53
Prispevkov: 2116
Aktiv.: 9.50
Kraj: Krško
|
| Objavljeno: Sob Feb 28, 2009 5:10 pm Naslov sporočila: |
|
|
| program_er je napisal/a: |
Torej bo zdaj OK. Pride pa še nekaj tipk (zdaj še nevem koliko), ki pa jih znam priklopit: en kontakt na GND, drugi na pin mege in preko upora (4,7k) na VCC ter nekaj ledic tu pa tam za lepši izgled.
Bojim se samo, da bo TIV morala biti dvostranska.  |
pullup uporov ni potrebno,ker jih lahko uporabiš notranje
_________________
Denis |
|
| Nazaj na vrh |
|
|
gumby
Član

Pridružen-a: Sob 28 Apr 2007 12:32
Prispevkov: 4066
Aktiv.: 18.39
|
| Objavljeno: Sob Feb 28, 2009 5:16 pm Naslov sporočila: |
|
|
Vrži ven oba 7805 in naredi nek preprost stikalni napajalnik... baterija bo dalj časa držala
_________________
Tule nisem več aktiven. |
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
| Objavljeno: Sob Feb 28, 2009 5:27 pm Naslov sporočila: |
|
|
| gumby je napisal/a: |
| Vrži ven oba 7805 in naredi nek preprost stikalni napajalnik... baterija bo dalj časa držala |
Ni mi tako pomembna varčnost. Bolj zanesljivost, funkcionalnost in dokaj enostavna izdelava. Pa vseeno, mogoče pa res, samo nisem še nikoli delal stikalnih napajalnikov. Kak primerček vezave ne bi škodil.
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
|
|
| Nazaj na vrh |
|
|
gumby
Član
Pridružen-a: Sob 28 Apr 2007 12:32
Prispevkov: 4066
Aktiv.: 18.39
|
| Objavljeno: Sob Feb 28, 2009 5:49 pm Naslov sporočila: |
|
|
Datasheet za MC34063 poglej, je precej primerov not...
_________________
Tule nisem več aktiven. |
|
| Nazaj na vrh |
|
|
program_er
Član
Pridružen-a: Sob 08 Mar 2008 13:47
Prispevkov: 2173
Aktiv.: 10.32
Kraj: Maribor (Pohorje)
|
| Objavljeno: Sob Feb 28, 2009 7:34 pm Naslov sporočila: |
|
|
Zanimiv čip, si bom zapomnil. Ampak v tem primeru bom vseeno vzel L7805CV, ker rabim manj dodatnih elementov pa bolj enostaven je.
No, zdaj pa k programiranju.
Fotoupori so postavljeni tako:
|||||F1|||||F2||||||||F3||||||||F4|||||F5|||||
Recimo da je Motor1 levi, Motor2 pa desni motor.
Princip delovanja je tak, da naj bi bil F1 vedno na črnem, ostali pa vedno na belem. Če bi prišel F4 na črno, bi se PD4 dal na 0 in motorju bi zmanjkalo toka. Nebi se sunkovito zaustavil, samo upočasnil bi zelo. To je za blag ovinek. Če pa prišel še F5 na črno pa bi moral Motor2 zavreti (kako to narediti na shemi? Uporabil bi rele, ki bi motorju naredil kratki stik ampak je prevelik), dokler nebi bil F3 na črnem, vsi ostali na belem. Za levo stran bi bilo enako.
Vseh FR (fotouporov) na enkrat žal ne morem kontrolirati. Zdaj pa nevem, ali naj z ukazom IF hitro pregledam vsaki FR posebej, če je na svoji barvi ali naj uporabim While-Wend...
Z IF bi bilo nekako takole (pišem "na pamet" in bolj shematsko, kot pa v Bascom jeziku):
Meja je npr. 500. Pod 500 je črno, nad 500 je belo.
| Koda: |
Do
If F2 < 500 Gosub Leviov
If F4 < 500 Gosub Desniov
If F1 < 500 Gosub Oleviov
If F5 < 500 Gosub Odesniov
Loop
Leviov:
If F2 < 500 Then
motor1 = 0
End If
motor1 = 1
Return
Desniov:
If F4 < 500 Then
motor2 = 0
End If
motor2 = 1
Return
Oleviov:
If F1 < 500 Then
motor1 = 0
bremza1 = 1 (tega še ni v shemi)
End If
bremza1 = 0
motor1 = 1
Return
Odesniov:
If F5 < 500 Then
motor2 = 0
bremza2 = 1 (tega še ni v shemi)
End If
bremza2 = 0
motor2 = 1
Return
End
|
Uh, vidim, da v tem primeru sploh ne rabim F3. Ampak imam občutek, da tako sledibot nebi deloval ravno najbolje.
Z While-Wend:
| Koda: |
Goto Glavno
Glavno:
If F2 < 500 Gosub Leviov
If F4 < 500 Gosub Desniov
Goto Glavno
Leviov:
While F2 < 500
motor1 = 0
If F1 < 500 Goto Oleviov
Wend
motor1 = 1
Goto Glavno
Return
Desniov:
While F4 < 500
motor2 = 0
If F5 < 500 Goto Odesniov
Wend
motor2 = 1
Goto Glavno
Return
Oleviov:
While F1 < 500
motor1 = 0
bremza1 = 1
Wend
bremza1 = 0
Goto Leviov
Odesniov:
While F5 < 500
motor2 = 0
bremza2 = 1
Wend
bremza2 = 0
Goto Desniov
End
|
Pomoje razumete, kaj sem hotel napisati, Bascom je itak čito enostaven. Goto pomeni naj gre nekam, Gosub pa pomeni da gre v podrutino in se potem vrne na mesto, od kjer je odšel.
Meni se zdi ona z While boljša verzija, čeprav bi bilo najbolše oboje skupaj zmešati. Eh, že jaz sem vse zamešal...
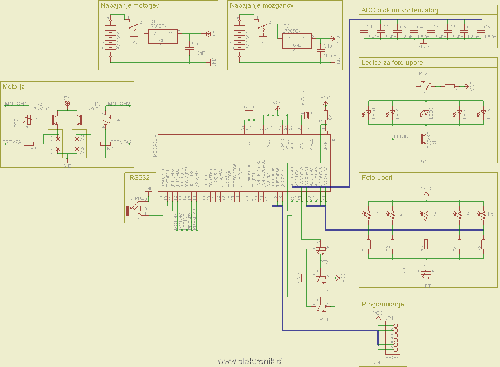
Jaz sem "bremzo" mislil narediti kot je na priloženi sliki, le da mora biti potem koda malo obrnjena! Tako npr:
motor2 = 0
bremza2 = 0
Wend/End If
bremza2 = 1
motor2 = 1
Torej, v tem mojem primeru "bremze" se mora motor1 ali 2 (tranzistor) vedno prej ugasniti, potem se prižge bremza, potem se moram najprej bremza dati na 1, šele potem prižgati spet odpreti tranzistor/prižgati motor. To pa zto, da ni kratkega stika.
EDIT: Čisto sem pozabil...Oh, ob vsem tem pa moram nekam še vkjučiti merjenje ADC (in po možnosti še preverjanje RS232 jacka ter print ukaze, toda to ni nujno.)!
| Opis: |
|
| Velikost datoteke: |
42.5 KB |
| Pogledana: |
21 krat |
|
_________________
Upanje ni del naše projektne strategije.
Member of Trisat - 1. Slovenian satellite running new fault tolerant aerospace processor.
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 502 dni
Powered by phpBB © 2001, 2005 phpBB Group
|