 |
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
Vinkel
Član


Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
 Objavljeno: Sre Feb 02, 2011 5:35 pm Naslov sporočila: Inercialni navigacijski sistem (3d acc + gyro) Objavljeno: Sre Feb 02, 2011 5:35 pm Naslov sporočila: Inercialni navigacijski sistem (3d acc + gyro) |
 |
|
Zanima me, ali ima kdo kakšne praktične izkušnje z samo natančnostjo pospeškomerov ali INU modulov ?
Gledal sem malo tale modul..
http://www.gadgetgangster.com/find-a-project/56?projectnum=213
Kakšne natančnosti pozicioniranja in ponovljivosti v prostoru (cca 1m^3) se da s čim takim doseči?
Nazadnje urejal/a Vinkel Sre Feb 02, 2011 6:23 pm; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
 |
igo
Član
Pridružen-a: Sre 11 Okt 2006 19:11
Prispevkov: 3641
Aktiv.: 16.01
|
| Objavljeno: Sre Feb 02, 2011 10:46 pm Naslov sporočila: |
|
|
Vzemi kratko ravnilo in vsakih 5cm na riši črtico. Vsakih 5cm odmeri za sproti od prejšnje črtice.
Nato vzemi meter in ga priloži k črticam. Videl boš, da je čez 1m napaka že opazna. Pa si šel vedno v isto smer.
S tem sem ponazoril seštevanje napak pri relativnem pozicioniranju.
Pospeškometer ima končno hitrost vzorčenja.
Iz tega sledi, da boš pri hitrem pospeševanju kasneje ugotovil premik (dejanska pozicija je dlje od izračunane), pri počasnem pojemku pa bo izračunana pot sovpadala z dejansko potjo. Ampak skupna dejanska pozicija bo še vedno dlje od izračunane, saj si imel napako že od prej.
Po parih ponovitvah bosta poziciji že opazno odstopali.
Potem je še en problem, da imaš končno število možnih stopenj pospeška. Recimo 256. Če bodo pospeški majhni (10/256), dejanski pospešek bo pa 9,6/255, je napaka 0,4/9,6 , kar je milo rečeno precej. Pri velikih pospeških 210/256 in dejanskem pospešku 210,4/256 je ta napaka precej manjša.
Teoretično se lahko razliki med dejanskima in izračunanima pozicijama dveh zaporednih premikov izničita. Praktično pa se ne. Na dolgi rok se bo odstopanje povečevalo, zato se je treba redno vračati v izhodišče in brisati števce.
_________________
Teoretično je praksa posledica teorije, praktično je pa ravno obratno. (igo 2001)
LP, Igor |
|
| Nazaj na vrh |
|
|
mucek
Član

 
Pridružen-a: Tor 01 Avg 2006 10:47
Prispevkov: 5528
Aktiv.: 24.06
Kraj: Domzale
|
| Objavljeno: Sre Feb 02, 2011 10:58 pm Naslov sporočila: |
|
|
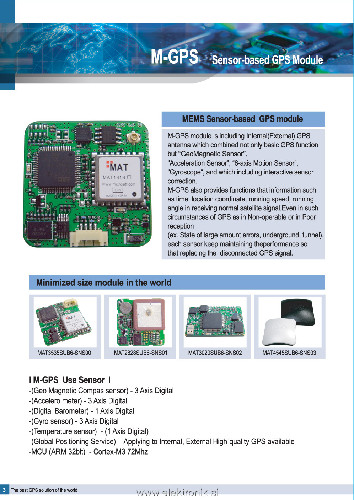
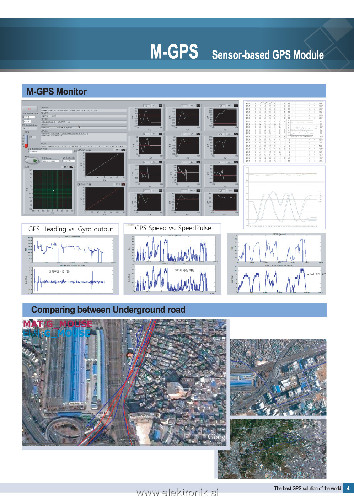
Zanimiva zadevica ...
Sampli bodo na voljo v začetku pomladi ...
LP, g
| Opis: |
|
| Velikost datoteke: |
381.74 KB |
| Pogledana: |
27 krat |
|
| Opis: |
|
| Velikost datoteke: |
420.78 KB |
| Pogledana: |
23 krat |
|
_________________
...lahko pa se tudi motim ... |
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Sre Feb 02, 2011 11:11 pm Naslov sporočila: |
|
|
| mucek je napisal/a: |
| Zanimiva zadevica ... |
Koštala bo pa tudi precej:)
Sicer mi GPS moduli niso zanimivi, jaz bi rad sledil recimo gibanju dlani in le to kar se da precizno. Več kot 6-osi dejansko ne potrebujem.
Sam se nagibam bolj h 3 osnem gyroscopu ITG 3200 in 3 osnem pospeškomeru ADXL345.. Pregledal sem že kar nekaj forumov, vendar na žalost nikjer nisem zasledil dosti od natančnosti..
Je kdo morda take senzorje obesil na kakšen CNC in preveril točnosti ?
|
|
| Nazaj na vrh |
|
|
bray
Član

Pridružen-a: Sre 19 Jan 2005 23:53
Prispevkov: 327
Aktiv.: 1.38
Kraj: Vransko
|
| Objavljeno: Čet Feb 03, 2011 1:28 am Naslov sporočila: |
|
|
Trenutno je najbolj vroca zadeva, ki je tudi ze dobavljiva (ampak dalec od obljubljene cene) tale cipek
http://invensense.com/mems/gyro/mpu6000.html
Preizkusil sem ze razne gyro in acc zadeve od freescale in AD predvsem za stabilizacijo RC modela in za en kvazi IMU. Vsekakor je to eno od meni najbolj zanimivih podrocij v moji hobi elektronski karieri.  Ampak zal ima dan samo 24ur..... Ampak zal ima dan samo 24ur.....
_________________
I didn't know it was impossible when I did it! |
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Čet Feb 03, 2011 1:43 am Naslov sporočila: |
|
|
MPU6000 in MPU6050 ima farnell za 30eur.. Ni ravno zastonj, vendar če računaš da te 3 osni gyro in 3 osni acc pride skupaj tudi toliko..
Lahko poveš kaj več od IMU-ja ? Kateri čipi, točnost....
|
|
| Nazaj na vrh |
|
|
NeoTO
Član

Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.62
Kraj: Trzic
|
| Objavljeno: Čet Feb 03, 2011 9:25 am Naslov sporočila: |
|
|
Trenutno se na podiplomcu ukvarjam ravno s podobnimi stvarmi. Če položaja ne popravljaš z neko zunanjo meritvijo (v mojem primeru kamero), ti ocena položaja prej ali slej začne lesti. Vzrokov je veliko, predvsem pa je pomembna kvaliteta (ki je sorazmerna s ceno) uporabljenih senzorjev, ki močno vpliva na to, koliko časa je ocena točna.
Orientacijo v 3-oseh boš brez problema dobil s 9-osnimi senzorji (rabiš namreč še magnetometer, da dobiš referenco za tretjo os). Da pa izračunaš pozicijo, moraš najprej iz izmerjenega pospeška izločit vpliv gravitacije in centripetalne sile, ter nato rezultat integrirat dvakrat. Če narediš majhno napako pri oceni orientacije, se ti bo to močno poznalo na dobljenem položaju. Je pa stvar precej zanimiva 
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
jursi
Član
Pridružen-a: Ned 27 Mar 2005 15:44
Prispevkov: 29
Aktiv.: 0.12
Kraj: Divača
|
| Objavljeno: Čet Feb 03, 2011 10:20 am Naslov sporočila: |
|
|
Pozdravljeni!
Bom še jaz povedal nekaj izkušenj iz prve roke. Pospeškometer dobro meri pospešek, slabše hitrost še slabše pa razdaljo, saj moramo za vsako stopnjo podatke enkrat integrirati.
Pri določanju razdalje napaka raste s kvadratom časa, zato postane ocena razdalje zelo hitro neuporabna. Kot je bilo že povedano moramo obvezno poznati tudi orientacijo merilnika v prostoru, ki jo najbolje dobimo s kombinacijo acc+gyro+mag (lahko tudi +gsm). Magnetni senzorji so pogojno uporabni, saj lahko motnje iz okolice presegajo vrednost Zemljinega magnetnega polja (predvsem v industrijskem okolju).
Predvsem je pa važno to, da moramo točno vedeti v kateri aplikaciji želimo uporabiti senzorski sistem, saj je od tega važno kako bomo napisali algoritem za združevanje podatkov acc+gyro+mag+gsm+... (data fusion). Pomembna je tudi kalibracija senzorjev, saj lahko s kvalitetno kalibracijo in obvezno tudi temperaturno kompenzacijo močno zmanjšamo negotovost meritev.
Z zgoraj opisanim načinom se da določiti orientacijo v prostoru na 0.2° natančno v statičnih razmerah, v dinamičnih razmerah pa napaka naraste na nekaj ° (vse je odvisno od dinamike merjenega objekta). Pri določanju razdalje je pa vse skupaj odvisno od aplikacije, razmerja signal/šum in časovnega intervala (tukaj še nimam veliko izkušenj).
david
|
|
| Nazaj na vrh |
|
|
SimonS
Član

Pridružen-a: Čet 01 Jul 2004 11:18
Prispevkov: 4769
Aktiv.: 20.13
Kraj: Kobarid
|
| Objavljeno: Čet Feb 03, 2011 10:27 am Naslov sporočila: |
|
|
Drži, kar pravi Matevž.
Tudi sam nekaj delam v tej smeri. Poleg senzorja pospeška in gyro rabiš tudi kompas. Le z kombinacijo vseh treh senzorjev dobiš realni pomik. Obstajajo že moduli, ki imajo v sebi vse te senzorje. Išči pod imenom IMU.
_________________
Lep dan
Simon |
|
| Nazaj na vrh |
|
|
mucek
Član
Pridružen-a: Tor 01 Avg 2006 10:47
Prispevkov: 5528
Aktiv.: 24.06
Kraj: Domzale
|
| Objavljeno: Čet Feb 03, 2011 11:25 am Naslov sporočila: |
|
|
| Vinkel je napisal/a: |
| Koštala bo pa tudi precej:) |
To je ravno tisto ... Obljubljali so ceno med 50 in 100 $ ...
Kakorkoli računam, mi nikakor ne uspe za tak denar dobiti skupaj vse te senzorje ...
Počakajmo, pa bomo videli ...
LP, Grega
_________________
...lahko pa se tudi motim ... |
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Čet Feb 03, 2011 12:56 pm Naslov sporočila: |
|
|
| NeoTO je napisal/a: |
| Če položaja ne popravljaš z neko zunanjo meritvijo (v mojem primeru kamero), ti ocena položaja prej ali slej začne lesti. |
Glede na to da mi computer vision ni tuj, sem tudi sam v grobem razmišljal že o integraciji SLAM ali PTAM metode, ki dopušča vnos podatkov o gibanju od zunaj (IMU) za zmanjševanje tolerančnega območja okoli točne lege, nato pa resetiranje IMUja z P3P metodo na vsake toliko časa..
Torej v splošnem nek optično-inercialni sistem.
NeoTo, s čim točno se pa ukvarjaš na podiplomcu?
|
|
| Nazaj na vrh |
|
|
NeoTO
Član
Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.62
Kraj: Trzic
|
| Objavljeno: Čet Feb 03, 2011 6:52 pm Naslov sporočila: |
|
|
| Vinkel je napisal/a: |
| NeoTO je napisal/a: |
| Če položaja ne popravljaš z neko zunanjo meritvijo (v mojem primeru kamero), ti ocena položaja prej ali slej začne lesti. |
Glede na to da mi computer vision ni tuj, sem tudi sam v grobem razmišljal že o integraciji SLAM ali PTAM metode, ki dopušča vnos podatkov o gibanju od zunaj (IMU) za zmanjševanje tolerančnega območja okoli točne lege, nato pa resetiranje IMUja z P3P metodo na vsake toliko časa..
Torej v splošnem nek optično-inercialni sistem.
NeoTo, s čim točno se pa ukvarjaš na podiplomcu? |
Delam na stabilizaciji kvadrokopterja v zaprtih prostorih, kjer si ne moreš pomagat z GPSom ter je 'zračnega prostora' precej manj. Srce je X-3D-[slovenščina je zame španska vas] kvadrokopter, ki ima vgrajen dokaj zmogljivo IMU enoto (v mojem primeru brez magnetnega senzorja, saj ga moti 0.5W video oddajnik), ter video kamera z video oddajnikom, ki sliko tarče na tleh prenaša na računalnik, kjer se izvaja vision del celotnega sistema. Delam pa tudi na tem, kako dobiti čim boljšo oceno položaja, čeprav je podatek iz kamere precej zakasnjen (tam okoli 300ms).
Žal mora celotna zadeva delat v real-time, zato zaenkrat ni procesorskega časa, da bi se igral s kakšnimi SIFT/SURF algoritmi.
Lahko kaj več poveš o tej P3P metodi. Prvič slišim za to.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Čet Feb 03, 2011 9:06 pm Naslov sporočila: |
|
|
| NeoTO je napisal/a: |
Žal mora celotna zadeva delat v real-time, zato zaenkrat ni procesorskega časa, da bi se igral s kakšnimi SIFT/SURF algoritmi. |
Ni časa za SIFT ? Preveri če imaš dovolj časa za Signatures, torej Fernse z deskriptorji. Signatures so časovno gledano močno superiorni nad Siftom ali surfom..
poraba časa:
X za sift
x/3 za surf
x/50 za signatures
Vsaka stvar ima svoje prednosti in svoje slabosti, treba bi bilo ob kakšni pijači prediskutirati:)
| Citiram: |
| Lahko kaj več poveš o tej P3P metodi. Prvič slišim za to. |
pri P3P ali PnP gre za estimacijo rotacijske in translacijske matrike ( homogena transformacija) iz 2d/3d "point correspodences", ob pogoju da imaš znano A matriko (intrinzični parametri kamere).
Zadevo sem sprobal v praksi, sicer ne realtime ker sem prototipiral z Matlabom. V bližnji prihodnosti nameravam poizkusiti narediti kakšne meritve da vidim odstopanja realnih pozicij od izračunanih po PnP.
|
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Pet Feb 04, 2011 2:33 am Naslov sporočila: |
|
|
| jursi je napisal/a: |
Z zgoraj opisanim načinom se da določiti orientacijo v prostoru na 0.2° natančno v statičnih razmerah, v dinamičnih razmerah pa napaka naraste na nekaj ° (vse je odvisno od dinamike merjenega objekta). Pri določanju razdalje je pa vse skupaj odvisno od aplikacije, razmerja signal/šum in časovnega intervala (tukaj še nimam veliko izkušenj). |
Si pri določevanju lege in kotov uporabljal Kalman- filter ali kakšne druge sofisticirane metode?
|
|
| Nazaj na vrh |
|
|
jursi
Član
Pridružen-a: Ned 27 Mar 2005 15:44
Prispevkov: 29
Aktiv.: 0.12
Kraj: Divača
|
| Objavljeno: Pet Feb 04, 2011 9:58 am Naslov sporočila: |
|
|
Uporabljen je bil adaptivni Kalmanov filter, ki se je v realnem času prilagajal dinamiki merjenca.
d
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 492 dni
Powered by phpBB © 2001, 2005 phpBB Group
|


