 |
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
Slowfly
Član

Pridružen-a: Sre 18 Feb 2004 2:07
Prispevkov: 4082
Aktiv.: 17.19
Kraj: Ljubljana
|
 Objavljeno: Tor Jan 31, 2012 1:35 am Naslov sporočila: Objavljeno: Tor Jan 31, 2012 1:35 am Naslov sporočila: |
 |
|
| Samo, daj tale kompas na moped, pa položi ovinek medtem pa opazuj kako se nagiba.
|
|
| Nazaj na vrh |
|
 |
SamoR
Član
Pridružen-a: Ned 24 Jan 2010 3:58
Prispevkov: 393
Aktiv.: 2.09
Kraj: Koper
|
| Objavljeno: Tor Jan 31, 2012 2:32 am Naslov sporočila: |
|
|
Ni bilo mišljeno za montažo na motor, ampak kot odgovor na vprašanje, kako taka busola dela. je pa v skrajnem primeru tudi to uporabno za prikaz nagiba. Na zunanji strani prilepiš senzorje, ki bodo zaznavali položaj kovinskega obtežilca in na podlagi tega lahko izračunaš nagib v levo ali desno. Lahko pa tudi naprej (spust prednje vilice) ali nazaj (dvig na zadnje kolo).
_________________
ISF
Boljše je sovražnik dobrega! |
|
| Nazaj na vrh |
|
|
zok
Član

Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 9:22 am Naslov sporočila: |
|
|
| igo je napisal/a: |
| Morda pa bi s kakšno črnobelo ali IR kamero zaznaval "horizont" oziroma cesto. |
Tukaj zal odpovem. Sem ze razmisljal o opticnih senzorjih, ampak si ne znam predstavljat kako bi iz kompozitnega signala s softverom izluscil neko integer vrednost, poleg tega pa bi se kot slabost lahko pokazala tudi obcutljivost na umazanijo.. res bi bila pa zadeva cenovno zelo ugodna: en laser ki sveti ob motorju navpicno navzdol, in kamera ki je pritrjena tako da "gleda" v horizontalni smeri. Pozicija laserjeve "pike" na sliki bi bil pa podatek iz katerega bi lahko dobili podatek o nagibu.
| Slowfly je napisal/a: |
| Hmm, daj razloži uporabnost tega podatka. Če konkretno polagaš ovinke, nimaš časa gledat nekakšen prikazovalnik nagiba, ker se boš slejkoprej nekje razlepil. |
Gre se za kompenzacijo vzorca svetlobnega snopa prednjega zarometa glede na nagibanje, zaviranje in pospesevanje motocikla. Neke vrste adaptivna osvetlitev, le da gre tu za spuscanje, dvigovanje in nagibanje zarometa. Ko motor nagnes, se na notranji strani zavoja doseg zarometa krepko zmanjsa, na zunanji strani pa ga dvigne, tako da blesci. To zadevo bi rad kompenziral, da bi zaromet svetil podobno kot pri avtomobilu.
| Slowfly je napisal/a: |
| Samo, daj tale kompas na moped, pa položi ovinek medtem pa opazuj kako se nagiba. |
Zal, vse kar deluje izkljucno na podlagi smeri gravitacije, tukaj odpove.
| VolkD je napisal/a: |
S pospeškometrom problem ni rešljiv.
Poizkusi raje z principom radarja. Dobe se alarmne naprave, pa tudi senzorji za odpiranje vrat, ki delujejo na frekvencah okrog 10 GHz. Princip delovanja je na doplerjevem efektu med lokalnim in odbitim signalom. Z dvema takima senzorjema bi zadeve lahko zelo zelo natančno realiziral. Tako natančno, da bi lahko celo izmeril globino kanala, če bi vozil po njem. |
tole me pa zelo zanima. Ce prav razumem gre za mikrovalovne senzorje?
|
|
| Nazaj na vrh |
|
|
boriskozjan
Član
Pridružen-a: Pet 14 Nov 2008 23:23
Prispevkov: 956
Aktiv.: 4.72
Kraj: Šmarje pri Jelšah
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 10:16 am Naslov sporočila: |
|
|
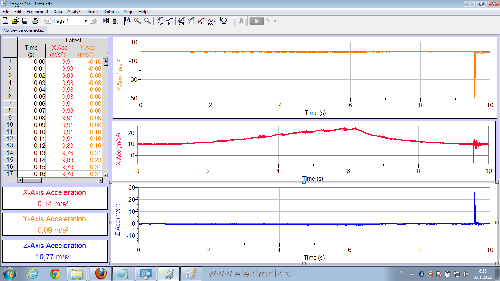
Naredil sem eno meritev z brezzicnim senzorjem pospeska, v priponki prilagam rezultat merjenja. Senzor sem dal na centrifugo, in sicer tako da se je "nagnil v ovinek".  Na zgornji strani je bil pritrjen na tecaj, tako da se je lahko prosto nagibal, stvar pa sem zavrtel toliko da je dosegla kot vec kot 60 stopinj glede na navpicnico. Na zgornji strani je bil pritrjen na tecaj, tako da se je lahko prosto nagibal, stvar pa sem zavrtel toliko da je dosegla kot vec kot 60 stopinj glede na navpicnico.
X os je bila obrnjena navzdol (gledano na senzor v mirujocem stanju), Y os je bila "v smeri voznje" (tangencialno glede na kroznico), in Z os v smeri proti srediscu kroznice. Ko sem zadevo zavrtel so se moja predvidevanja potrdila: X os je zabelezila povecan pospesek, Y in Z pa sta ostali okrog nicle (razen minimalnih odstopanj - tu gre za motnje). To bi bilo dovolj za izracun nagiba, ce bi:
a) poznali smer nagiba (levo/desno)
b) ce ne bi bilo vibracij s strani motorja
c) (se huje) ce ne bi bilo vibracij s strani podlage
Prioblem B in C se da do neke mere omiliti z "mehko" pritrditvijo in integriranjem, problem A pa je samo s tem senzorjem neresljiv na enostaven in lahek nacin. Morda z merjenjem bocnega pospeska, in da je senzor cim blizje podlagi (cim dlje od tezisca), hm... 
tocno tole bi potreboval!  edini problem je cena: http://www.ebay.com/itm/SparkFun-9-Degrees-Freedom-Razor-IMU-AHRS-comp-/140649221820?pt=LH_DefaultDomain_3&hash=item20bf58cebc edini problem je cena: http://www.ebay.com/itm/SparkFun-9-Degrees-Freedom-Razor-IMU-AHRS-comp-/140649221820?pt=LH_DefaultDomain_3&hash=item20bf58cebc
Bom poskusil najti kaksno cenejso alternativo, ce ne bom pa v sluzbi pobaral nase fante v elektro laboratoriju koliko kaj uporabljajo tiste priprave za SMD spajkanje, in ce bi bil kdo pri volji mi zadevo sestavit. Sam se namrec se vedno z vsemi petimi oklepam klasike, in se v SMD nekako ne znajdem. 
| Opis: |
|
| Velikost datoteke: |
117.35 KB |
| Pogledana: |
27 krat |
|
| Opis: |
|
| Velikost datoteke: |
1.08 MB |
| Pogledana: |
13 krat |

|
|
|
| Nazaj na vrh |
|
|
boriskozjan
Član
Pridružen-a: Pet 14 Nov 2008 23:23
Prispevkov: 956
Aktiv.: 4.72
Kraj: Šmarje pri Jelšah
|
|
| Nazaj na vrh |
|
|
borber
Član

Pridružen-a: Pon 23 Maj 2005 8:40
Prispevkov: 3111
Aktiv.: 13.10
Kraj: LJUBLJANA
|
| Objavljeno: Tor Jan 31, 2012 11:04 am Naslov sporočila: |
|
|
| zok, glede na to kaj si v prvem postu navedel, kot možnosti za meritev in kar je napisanega do sedaj, še vedno ni jasno kateri nagib te zanima. Je to nagib glede na podlago, cesto ali nagib glede na smer gravitacije ali oba.
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 11:31 am Naslov sporočila: |
|
|
zanima me nek priblizek nagiba na cesto, zadovoljen bi bil z nagibom tako na vodoravnico kot na trenutno podlago pod motociklom. Vsak priblizek je ob filtriranju motenj boljsi kot nic. S sodelavcem (profesorjem fizike na gimnaziji) sva malo prestudirala zadeve, in z matematicnega vidika bi bila dalec najenostavnejsa resitev z dvema merilnikoma razdalj - ena kotna funkcija (arc tan (delta D / razdalja med tockama merjenja) ), pa jo imamo.
Razmisljal sem se o dveh varjantah: merilnik pospeska v navpicni smeri s pomocjo katerega bi izracunali kot nagiba, in en senzor razdalje na strani motocikla s katerim bi dolocili smer nagiba motocikla.
Druga varjanta ki mi ni najbolj vsec je pa uporaba dveh senzorjev pospeska, ki sta locirana na doloceni razdalji vsaksebi. Ce en senzor zaznava vecji pospesek v navpicni smeri od drugega torej gre za rotacijo po vzdolzni osi v doloceni smeri, povprecje obeh pospeskov pa bi uporabil za dolocanje kota nagiba (vecji kot je, vecji je nagib - kot na prej objavljeni priponki).
Se vedno pa se bojim kaj se bo dogajalo s senzorji pospeska na neravni - luknjasti podlagi, bog ne daj na makadamu cemur moj motocikel sicer ni namenjen, ampak zadevo bi rad naredil na tak nacin, da bi bila "as is" uporabna tudi za industrijo - kar je tudi osnovni namen studija mehatronike.
|
|
| Nazaj na vrh |
|
|
borber
Član
Pridružen-a: Pon 23 Maj 2005 8:40
Prispevkov: 3111
Aktiv.: 13.10
Kraj: LJUBLJANA
|
| Objavljeno: Tor Jan 31, 2012 1:27 pm Naslov sporočila: |
|
|
| Recimo, da pelješ s konstantno hitrostjo po levem ovinku speljanem v klanec. Cesta je nagnjena za 2°, motor je pravokoten na cestišče in klanec ima nagib 5°. Kaj naj ti tvoj merilec pokaže?
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 1:55 pm Naslov sporočila: |
|
|
odvisno katerega pristopa bi se lotil. Ce bi podatke zajemal z dvema senzorjema distance bi zaznali kot 0 stopinj glede na podlago - klanec tu nima vloge. Ce bi podatke zajemal z giroskopom bi zaznali kot 2 stopinje - tudi tu klanec nima vloge. Ce bi uporabili senzorje pospeska bi pa na delu kjer se vzpon zacne zaznali povecan pospesek v navpicni smeri, torej bi bil podatek o kotu nagiba prevelik. V tem primeru bi raje videl da bi zaznal 0 stopinj, da bi luc svetila podlagi skladno, kot pa 2 stopinji. Res pa se lahko zgodi da bi luc svetila narobe glede na podlago ki bi (nekje nekaj deset metrov naprej) bila spet brez naklona, ampak to je ze podrocje ki predvideva oz. zaznava pot ki jo bo motocikel sele prevozil, to pa ni vec moj namen ker vkljucuje ze ogromno dodatne senzorike, algoritmov in visoko procesorsko moc.
Po testih z merilci pospeska sem nekako obupal nad njimi. Da se z integriranjem izracunati zeljeni rezultat, vendar je ze pri staticnih testih ta podatek prevec nenatancen, ko bodo v igri se motnje iz podlage bo pa ta podatek popolnoma nezanesljiv.
Najbolj se nagibam k dvema merilcema razdalje in piezo-gyro senzorju. S senzorjema razdalje bi si Atmega sproti postavljala neko povprecno vrednost ki naj bi predstavljala navpicno os (recimo vsako sekundo bi zajela podatka in ob upostevanju gyro podatka izracunala navpicnico - tako bi se skompenzirale napake), preko gyro senzorja pa potem tipala v kaksni legi je motocikel. Ugotoviti moram samo se na kak nacin komunicira kaksen ceneni gyro senzor - na primer tale: http://www.ebay.com/itm/ENC-03-Module-Single-Axis-Gyro-Angular-Velocity-Sensor-/250912598866?pt=LH_DefaultDomain_0&hash=item3a6b8e6b52
Glede na to da tu senzorja razdalje nista bistvena za sprotno preracunavanje nagiba, bi lahko po moje uporabil tudi dva cenovno ugodna IR senzorja. Ker bi slo za veliko stevilo meritev bi se verjetno tudi navpicnica cez nekaj meritev pravilno zdefinirala.
|
|
| Nazaj na vrh |
|
|
borber
Član
Pridružen-a: Pon 23 Maj 2005 8:40
Prispevkov: 3111
Aktiv.: 13.10
Kraj: LJUBLJANA
|
| Objavljeno: Tor Jan 31, 2012 2:13 pm Naslov sporočila: |
|
|
| Je tvoja naloga izdelati usmerjanje žarometa glede na lego motorja?
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 4:06 pm Naslov sporočila: |
|
|
Tako je. +/- nekaj stopinj - se vedno bo vzorec svetlobnega snopa bistveno bolj uporaben kot fiksno pritrjena luc.
OK, nekako sem se mi glede enostavnosti in zanesljivosti se najboljsa zdi kombinacija senzorja pospeska ter dveh IR senzorjev distance (za definicijo navpicnice) in gyro senzor za zaznavanje nagiba. upam da bo to dovolj . 
senzor pospeska naj bi podal svoj podatek dokler motocikel se miruje (se pravi takoj ob zagonu), ko bi se motocikel premikal bi pa s senzorjema distance lahko vsake toliko popravil slip gyrota. Za odcitavanje trenutne razdalje bi bil zadolzen gyro. 
|
|
| Nazaj na vrh |
|
|
borber
Član
Pridružen-a: Pon 23 Maj 2005 8:40
Prispevkov: 3111
Aktiv.: 13.10
Kraj: LJUBLJANA
|
| Objavljeno: Tor Jan 31, 2012 5:05 pm Naslov sporočila: |
|
|
| No, sedaj opiši kako naj to usmerjanje deluje glede na nagib motorja levo-desno, naprej-nazaj in vožnjo v ovinku.
|
|
| Nazaj na vrh |
|
|
xfce
Član
Pridružen-a: Čet 28 Jul 2011 8:06
Prispevkov: 521
Aktiv.: 3.07
|
| Objavljeno: Tor Jan 31, 2012 7:05 pm Naslov sporočila: |
|
|
@zok
http://www.ac-celeia.si/opel/zafira-tourer/znacilnosti.asp
Pomojem bi se moral problema lotiti takole:
1. Najprej poišči in preberi kako delujejo dosedanji sistemi, stvar namreč obstaja
2. Poglej zakone, koliko daleč morajo svetiti luči, dolge in kratke
3. Točno se zamisli, kako se bodo žarometi prilagajali. Samo na nagib vozila na podlago ali tudi morebitnim vzponom ali spustom pred seboj.
4. preračuanj s kotnimi funkcijami za koliko ° moraš premikati žaromete, da nastvaljaš domet od naprimer 10m do 100m in kakšno natančnost merilnika potrebuješ, da bo še smiselno.
5. Ugotovi, kakšno določanje kota je primerno in dovolj natančno, da boš lahko ustrezno prilagajal žaromete.
Sam mislim, da bo to zaznavanje dokaj komplicirano. Ti rabiš verjetno na +-1 ° natančen podatek, ob vibracijah in poškodbah na cestišču težko določil.
Kar je pa najbolj uporabno je pa to, da je domet tvojih žarometov vedno enak. Ne glede na klanec, ki je pred tabo ali pa če pospešuješ ali zaviraš.
Sam bi naredil tako, da bi spredaj namontiral merilec razdalje(ki bi bil usmerjen tako kot žarometi, vrjetno bolj v tla), ki bi na ravnini naprimer izmeril 10m, pred klancem bi pa nameril naprimer 5m in bi ti za ustrezen faktor povišal domet žarometov. To bi bilo res uporabno. Za zanesljivost bi uporabil naprimer IR merilnik razdalje in ultrazvočni merilnik, ki bi kompenzirala Moral bi pa še detektirati vozilo
Sam položaj motorja se mi ne zdi pomemben, zato ker je lahko vozišče pred teboj vzpenja ali pada, pa tudi položaj je težko določiti..
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Tor Jan 31, 2012 11:44 pm Naslov sporočila: |
|
|
| xfce je napisal/a: |
@zok
http://www.ac-celeia.si/opel/zafira-tourer/znacilnosti.asp
Pomojem bi se moral problema lotiti takole:
1. Najprej poišči in preberi kako delujejo dosedanji sistemi, stvar namreč obstaja
2. Poglej zakone, koliko daleč morajo svetiti luči, dolge in kratke
3. Točno se zamisli, kako se bodo žarometi prilagajali. Samo na nagib vozila na podlago ali tudi morebitnim vzponom ali spustom pred seboj.
4. preračuanj s kotnimi funkcijami za koliko ° moraš premikati žaromete, da nastvaljaš domet od naprimer 10m do 100m in kakšno natančnost merilnika potrebuješ, da bo še smiselno.
5. Ugotovi, kakšno določanje kota je primerno in dovolj natančno, da boš lahko ustrezno prilagajal žaromete.
Sam mislim, da bo to zaznavanje dokaj komplicirano. Ti rabiš verjetno na +-1 ° natančen podatek, ob vibracijah in poškodbah na cestišču težko določil.
Kar je pa najbolj uporabno je pa to, da je domet tvojih žarometov vedno enak. Ne glede na klanec, ki je pred tabo ali pa če pospešuješ ali zaviraš.
Sam bi naredil tako, da bi spredaj namontiral merilec razdalje(ki bi bil usmerjen tako kot žarometi, vrjetno bolj v tla), ki bi na ravnini naprimer izmeril 10m, pred klancem bi pa nameril naprimer 5m in bi ti za ustrezen faktor povišal domet žarometov. To bi bilo res uporabno. Za zanesljivost bi uporabil naprimer IR merilnik razdalje in ultrazvočni merilnik, ki bi kompenzirala Moral bi pa še detektirati vozilo
Sam položaj motorja se mi ne zdi pomemben, zato ker je lahko vozišče pred teboj vzpenja ali pada, pa tudi položaj je težko določiti.. |
kot prvo, sistem ki je uporaben pri avtomobilih je pri motociklih neuporaben, ker se avto prakticno ne nagiba.
1.)stvar obstaja le pri BMW K1600, ki pa je z informacijami kot vedno izredno skop - promovirajo kako izgleda in kako je to fino, to pa je tudi vse.
2.) Zakon je napisan za doseg kratke luci med 30 in 50 metri (vsaj pred desetimi leti je bil tak) - na ravni podlagi. Meni je torej vazna samo vodoravnica in kot luci na njo. Z nagibom motocikla se na eni strani zmanjsa na 10 metrov ali manj, na drugi pa poveca v neskoncnost.
3.) zaenkrat samo na nagib vozila. Na precno nagibanje je potem piece of cake - senzorje za hod podvozja ze imam pripravljene (vodotesni modelarski servomotorji brez drobovja).
4.) +/- 3° je vec kot dovolj. slabse kot fiksna luc tako ali tako ne biti. Ce se luc odkloni premalo je se vedno dosti bolje kot fiksna luc, ce se odkloni prevec je glede aktivne varnosti se toliko bolje - podaljsa vidnost v ovinek. Do neke mere seveda, kar je prevec je vseeno prevec. tja do 3 stopinje v plus ali minus (skupaj torej 6 stopinj) po mojem mnenju se ni kriticno.
Glede adaptivne osvetlitve glede na konfiguracijo terena - v take podrobnosti ne nameravam iti. Kot prvo - UZ in IR merilci pri taksnih razdaljah in hitrostih odpovejo (rad bi da je zadeva idiot proof), laserskega merilca pa si ne morem privosciti ker bi na koncu bila zadeva drazja kot moj moped. Ta zadeva bi bila morda izvedljiva z night vision kamero, katere pa zaenkrat se ne znam zdruziti z mikrokontrolerjem na ta nacin da bi iz zajetih podatkov izluscil kakrsenkoli zanesljiv podatek.
Glede tega da polozaj motorja ni pomemben - v priponkti prilagam dva snapshota iz videa, ki naj bi malo bolj nazorno pokazala kaj se zgodi s svetlobnim snopom v ovinku - zasencen del je v temi. Pri nagnjenem motociklu se na notranji strani snop skrajsa na vsega nekaj metrov, na zunanju pa sveti nekam v zrak... kot tretjo priponko sem se na hitro spacal ponazoritev kaj bi rad dosegel.
| borber je napisal/a: |
| No, sedaj opiši kako naj to usmerjanje deluje glede na nagib motorja levo-desno, naprej-nazaj in vožnjo v ovinku. |
kot prva faza samo to da ko se motor nagne desno ali levo, luc ostane priblizno v ravnini. Ko mi to uspe, in ko zadeva zacne delovati zanesljivo je projekt ze na 2/3 uspel.
| Opis: |
|
| Velikost datoteke: |
54.9 KB |
| Pogledana: |
2 krat |

|
| Opis: |
|
| Velikost datoteke: |
54.91 KB |
| Pogledana: |
2 krat |

|
| Opis: |
|
| Velikost datoteke: |
53.11 KB |
| Pogledana: |
4 krat |

|
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 7 dni
Powered by phpBB © 2001, 2005 phpBB Group
|


