 |
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
SamoR
Član

Pridružen-a: Ned 24 Jan 2010 3:58
Prispevkov: 393
Aktiv.: 2.09
Kraj: Koper
|
 Objavljeno: Sre Feb 01, 2012 1:23 am Naslov sporočila: Objavljeno: Sre Feb 01, 2012 1:23 am Naslov sporočila: |
 |
|
Za to kar ti rabiš, je najboljša busola v tekočini s senzorji nagiba. Vedno ostane vodoravna in s pomočjo senzorja premikaš žaromet v treh oseh : gor, dol, levo, desno. Poglej si kakšno busolo, ki si jo džiparji nameščajo na armaturko za zaznavanje nagiba izven ceste. Mehanika tu ne zataji.
Tudi to si poglej
http://www.youtube.com/watch?feature=endscreen&v=jKK_vrJuoqg&NR=1
| Opis: |
|
| Velikost datoteke: |
42.05 KB |
| Pogledana: |
0 krat |

|
_________________
ISF
Boljše je sovražnik dobrega! |
|
| Nazaj na vrh |
|
 |
zok
Član

Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Sre Feb 01, 2012 8:01 am Naslov sporočila: |
|
|
| zok je napisal/a: |
| zal pa vse kar deluje na spremenjeno smer teznostnega pospeska glede na senzor odpade saj je motocikel zaradi centripetalne/centrifugalne sile "navidezno" vedno v pokoncni legi (smer pospeska nanj se v precni smeri ne spreminja), le teznostni pospesek nanj se spreminja, npr. pri pokoncni legi je 1 G, v nagibu +/-45° = 1,41 G. To pa ni dovolj da bi dolocil kot nagiba (ali je v plus ali minus). |
| zok je napisal/a: |
Problem pri motociklih pa je v nasprotju z avtomobili ta, da je bocni pospesek v precni smeri glede na motocikel VEDNO okrog nicle.
|
| zok je napisal/a: |
Zal, vse kar deluje izkljucno na podlagi smeri gravitacije, tukaj odpove.
|
| VolkD je napisal/a: |
| S pospeškometrom problem ni rešljiv. |
| zok je napisal/a: |
sistem ki je uporaben pri avtomobilih je pri motociklih neuporaben, ker se avto prakticno ne nagiba.
|
ocitno na treh straneh nisem znal dovolj jasno opredeliti problema in okoliscin. 
|
|
| Nazaj na vrh |
|
|
silvo22
Član
Pridružen-a: Tor 10 Avg 2010 18:25
Prispevkov: 510
Aktiv.: 2.81
Kraj: Nova Gorica
|
|
| Nazaj na vrh |
|
|
lojzek
Član


Pridružen-a: Pet 25 Jan 2008 8:00
Prispevkov: 3388
Aktiv.: 15.95
|
| Objavljeno: Sre Feb 01, 2012 11:01 am Naslov sporočila: |
|
|
SamoR: motor in džip sta glede uporabnosti tvoje "džiparske" dvojne busole dve vesolji narazen.
Po moje bi bilo najbolj uporabno merjenje razdalje do tal na obeh straneh motocikla. Potem pa z malce preračunavanja dobiš kot nagiba glede na podlago.
V odvisnosti od vrste uporabljenih senzorjev - če so analogni (z analognim izhodom), bi se morebiti dalo zadevo realizirati tudi s klasiko (diferencialni ojačevalnik?). Pri tem pa sploh nebi bilo potrebno vedeti, koliko ° je nagnjen motor.... Edinole neko sprejemljivo povprečenje (ki bi izničilo "motnje" meritev) bi moral aplicirat, da bo uporabno na motorju...
|
|
| Nazaj na vrh |
|
|
xfce
Član
Pridružen-a: Čet 28 Jul 2011 8:06
Prispevkov: 521
Aktiv.: 3.07
|
| Objavljeno: Sre Feb 01, 2012 11:42 am Naslov sporočila: |
|
|
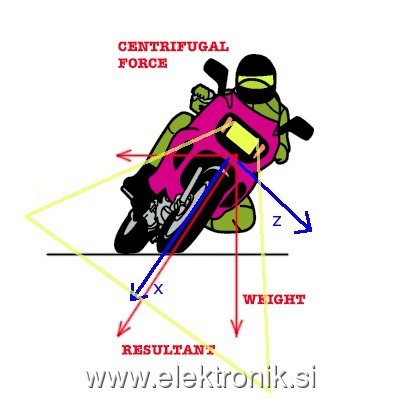
No sedaj mi je jasno, kaj pravzaprav želiš. Snop usmerjati glede na nagib motorja, da je le ta poravnan s cesto.
Pri tvojem grafu je vmes je Z os malo negativna zaradi centrifugalnega pospeška.
Tukaj je slika motorja in sile, ki delujejo nanjv v ovinku. Narisal sem še kako žaromet osvetlji cesto v ovinku - to je težava ja 
Kar se zgodi je to, da se v ovinku ti toliko nagneš, da se gravitacijska in centrifugalna izenačita, da te ne vrže z ovinka.
Tako, da z merilnikom pospeška pomojeda ne boš opravil nić. Razen mehanski žiroskop? Mogoče če bi kombiniral 3D merilnik zemljskega polja ampak so tudi motnje, dalnovodi, veliko kovine od motorja...
Mogoče bi blo še najlaže eno dimenzionalni merilnik pospeška samo po osi x in merilniki razdalje levo desno samo da ugotoviš kam je nagnjen, potem bi si pa pomagal z rezultanto pospeška
Stvar vsekakor ni enostavna. Sploh s kakšno busolo (če bi bilo tako simpl bi žaromet predelal v "busolo" in bi se pač sam nagibal, pa ni tako)
| Opis: |
|
| Velikost datoteke: |
28.94 KB |
| Pogledana: |
2 krat |
|
|
|
| Nazaj na vrh |
|
|
silvo22
Član
Pridružen-a: Tor 10 Avg 2010 18:25
Prispevkov: 510
Aktiv.: 2.81
Kraj: Nova Gorica
|
| Objavljeno: Sre Feb 01, 2012 11:56 am Naslov sporočila: |
|
|
Ok. Zadeva mi je jasna in je rešljiva zgolj z utežjo in ročičnim mehanizmom.... 
Če je poanta premikanje žarometa je to rešitev, če je poanta v elektronskem načinu pa je drug par klobas.
_________________
http://www.youtube.com/user/hscncmachines |
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Sre Feb 01, 2012 11:58 am Naslov sporočila: |
|
|
| lojzek je napisal/a: |
Po moje bi bilo najbolj uporabno merjenje razdalje do tal na obeh straneh motocikla. Potem pa z malce preračunavanja dobiš kot nagiba glede na podlago.
V odvisnosti od vrste uporabljenih senzorjev - če so analogni (z analognim izhodom), bi se morebiti dalo zadevo realizirati tudi s klasiko (diferencialni ojačevalnik?). Pri tem pa sploh nebi bilo potrebno vedeti, koliko ° je nagnjen motor.... Edinole neko sprejemljivo povprečenje (ki bi izničilo "motnje" meritev) bi moral aplicirat, da bo uporabno na motorju... |
Tocno to imam tudi sam v mislih. Nekako se nagibam k infrastrukturi ki je pripeta v priponki. Ce gresta oba servota gor se luc dvigne, oba dol luc spustita, en gor en dol pa pomeni nagib.
Za poskus bom kupil tri IR senzorje (http://www.ebay.com/itm/SHARP-IR-Ranger-Sensor-GP2D12-Arduino-/220925079892?pt=LH_DefaultDomain_0&hash=item3370293154) in jih z Vernierjem LabPro ter laptopom za logiranje preizkusil na avtomobilu na poti v sluzbo in domov - enkrat vsak na svoji visini (recimo na 20, 35 in 50 cm od tal), enkrat pa vsi trije na enaki oddaljenosti od tal. Ce se bo izkazalo da vsi kazejo priblizno pricakovane rezultate brez omembe vrednih odstopanj, se bo verjetno obneslo tudi na motociklu.
Glede povprecja bi lahko zadevo resil nekako takole:
| Koda: |
dim levopovprecje as word
dim desnopovprecje as word
dim zadajpovprecje as word
dim levi(20) as word
dim desni(20) as word
dim zadaj(20) as word
dim indeks as integer
dim i as integer
indeks = 1
Start Adc
on timer0 zajempodatkov
do
...glavna koda...
loop
zajempodatkov:
levi(indeks) = Getadc(0)
desni(indeks) = Getadc(1)
zadaj(indeks) = Getadc(2)
desnopovprecje = 0
levopovprecje = 0
zadaj povprecje = 0
for i=1 to 20
desnopovprecje = desnopovprecje + desno(i)
levopovprecje = levopovprecje + levo(i)
zadajpovprecje = zadajpovprecje + zadaj(i)
next
incr indeks
if indeks = 21 then
indeks = 1
endif
return
|
S tem bi na enostaven nacin dosegel da se kot spremenljivka izmerjeno vrednost uporabi sestevek zadnjih dvajsetih meritev. Ce je ena totalno mimo (recimo namesto neke vrednosti je 0), se to pozna max 5%. Ker bi pa meritve potekale hitro, bi se tudi napaka hitro izbrisala iz polja. Tu gre samo za vprasanje procenta (ne)kvalitetnih meritev. To bom pa videl sele ko bom zadevo testiral na avtomobilu.
Glede dela s klasiko bi slo ze tako da bi vsak stranski senzor preko vmesnika (servo testerja in nekaj malega periferije) priklopil po en servo (desni senzor na desni servo in obratno), ampak mislim da bi bilo tisto skoraj malo prevec partizanska resitev za diplomsko. 
Nazadnje urejal/a zok Čet Apr 11, 2013 8:29 am; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Sre Feb 01, 2012 12:10 pm Naslov sporočila: |
|
|
| xfce je napisal/a: |
Razen mehanski žiroskop? Mogoče če bi kombiniral 3D merilnik zemljskega polja ampak so tudi motnje, dalnovodi, veliko kovine od motorja...
Mogoče bi blo še najlaže eno dimenzionalni merilnik pospeška samo po osi x in merilniki razdalje levo desno samo da ugotoviš kam je nagnjen, potem bi si pa pomagal z rezultanto pospeška |
merilnik zemeljskega polja bi bil uporaben mogoce za inicializacijo giroskopskega senzorja da si doloci nicelno lego preden motor vzgem, potem pa mislim da mu blizina vzigalnih kablov ne bi ravno ugajala.
Tudi merilnik pospeska po X osi sem imel v mislih, potem pa je eden izmed forumasov omenil klancine - ko se cesta zacne/neha vzpenjati/spuscati, hm... no go.
Z utezjo zagotovo ne bo slo. Slo bi z mehanskim giroskopom, ampak moj cilj je zadevo realizirat s cim manj mehanskimi komponentami - tako zaradi cene, kot tudi zaradi vzdrzljivosti in zanimivosti za industrijo. Ce se le da, je najbolje za vecino problemov poskrbeti s softverom - to je bistveno cenejsa resitev kot hardver, in danes vsa avto/moto industrija tezi h kar se le da minimalizirani kolicini hardvera da je se mozno da se neka funkcija zanesljivo izvaja..
|
|
| Nazaj na vrh |
|
|
lojzek
Član
Pridružen-a: Pet 25 Jan 2008 8:00
Prispevkov: 3388
Aktiv.: 15.95
|
| Objavljeno: Sre Feb 01, 2012 12:15 pm Naslov sporočila: |
|
|
| zok je napisal/a: |
| Glede dela s klasiko bi slo ze tako da bi vsak stranski senzor preko vmesnika (servo testerja in nekaj malega periferije) priklopil po en servo (desni senzor na desni servo in obratno), ampak mislim da bi bilo tisto skoraj malo prevec partizanska resitev za diplomsko. |
Najbolj "partizanske" rešitve so ponavadi v kruti realnosti najboljše. Na žalost pa bi s tem res težko prišel skozi diplomo 
|
|
| Nazaj na vrh |
|
|
SamoR
Član
Pridružen-a: Ned 24 Jan 2010 3:58
Prispevkov: 393
Aktiv.: 2.09
Kraj: Koper
|
| Objavljeno: Sre Feb 01, 2012 2:11 pm Naslov sporočila: |
|
|
| zok je napisal/a: |
... kot tudi zaradi vzdrzljivosti in zanimivosti za industrijo. Ce se le da, je najbolje za vecino problemov poskrbeti s softverom - to je bistveno cenejsa resitev kot hardver, in danes vsa avto/moto industrija tezi h kar se le da minimalizirani kolicini hardvera da je se mozno da se neka funkcija zanesljivo izvaja.. |
Elektronika je v avtu - motorju bistveno manj vzdržljiva od mehanike ravno zaradi cenenosti izdelave. Prevozna sredstva izpred petdesetih let še prav lepo delajo, pa razen vžigalne tuljave niso imela nikakršne elektronike. Vprašanje pa je, ali bodo današnja prevozna sredstvs še delala čez pet, pa naj bo deset let, ne da bi kakšen elektronski del crknil.
Žalostno je, da se industrija nagiba k elektroniki, ne zaradi kvalitete, temveč zaradi cenenosti in pa zaradi nezmožnosti uporabnika, da bi sam popravil stvar. Drago prodati ceneno elektroniko kot rezervni del, je cilj današnje industrije prevoznih sredstev.
_________________
ISF
Boljše je sovražnik dobrega! |
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Sre Feb 01, 2012 2:18 pm Naslov sporočila: |
|
|
Res je. Ampak predstavljaj si stare avtomobile s toliko funkcijami kot jih imajo danasnji avtomobili - bog ne daj da bi imeli vse funkcije mehansko resene (ABS, ESP, BC, EFI itd) - verjetno bi bilo tudi to povsem neprimerljivo med seboj. Bojim se, da celo v obratnem sorazmerju kot zanesljivost starejsih generacij avtomobilov. 
|
|
| Nazaj na vrh |
|
|
SamoR
Član
Pridružen-a: Ned 24 Jan 2010 3:58
Prispevkov: 393
Aktiv.: 2.09
Kraj: Koper
|
| Objavljeno: Sre Feb 01, 2012 2:24 pm Naslov sporočila: |
|
|
Pri starih avtomobilih vsega tega nisi potrebival, saj so komajda dosegli hitrost 100
km/h. Pa tudi nestrpnih "šoferjev" je bilo manj. Pa še razvajeni smo postali.
_________________
ISF
Boljše je sovražnik dobrega! |
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Pon Feb 06, 2012 11:45 am Naslov sporočila: |
|
|
Material se pocasi nabira... Na zalogi sta ze dva serva (by Hobbyking), HID projektroski zaromet Valeo G3 z Osram zarnico D2S (by Renault Safrane Phase II), mini HID balast 12 V 35 W, mikrokontrolerje imam na zalogi, na ebayu pa sem narocil tudi senzor razdalje (zaradi cene zaenkrat samo enega), s katerim moram opraviti nekaj meritev da vidim kako se dejansko obnese v "nasih" okoliscinah. Ce se bo izkazal, narocim se dva.
Nazadnje urejal/a zok Čet Apr 11, 2013 8:31 am; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
eddie
Član
Pridružen-a: Sre 10 Dec 2003 21:02
Prispevkov: 723
Aktiv.: 3.04
Kraj: Severna primorska
|
| Objavljeno: Pon Feb 06, 2012 11:56 am Naslov sporočila: |
|
|
Tisto "povprečenje" ki si ga navedel pa nebo ravno OK.
Ti 20 povprečuješ 1 meritev iz ADCja!
Še branje ADCja v zanko pa bo malo bolje.
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 7 dni
Powered by phpBB © 2001, 2005 phpBB Group
|




