 |
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
zok
Član


Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
 Objavljeno: Pon Feb 06, 2012 12:23 pm Naslov sporočila: Objavljeno: Pon Feb 06, 2012 12:23 pm Naslov sporočila: |
 |
|
Sam si tole predstavljam takole (popravil imena spremenljivk):
| Koda: |
zajempodatkov: /ime podprograma/
levi(indeks) = Getadc(0) /branje analognih vrednisti v polja spremenljivk, indeks je stevilo meritve od 1 do 20/
desni(indeks) = Getadc(1)
zadaj(indeks) = Getadc(2)
desnopovprecje = 0 /"povprecne vrednosti" (v bistvu sestevke meritev) postavimo na 0/
levopovprecje = 0
zadaj povprecje = 0
for i=1 to 20 /s for zanko sestejemo vse meritve posameznih vrednosti v poljih - zadnja meritev plus prejsnjih 19/
desnopovprecje = desnopovprecje + desni(i)
levopovprecje = levopovprecje + levi(i)
zadajpovprecje = zadajpovprecje + zadaj(i)
next
incr indeks /zvisaj indeks da se bo naslednja meritev shranila na drugo mesto in prepisala najstarejso meritev/
if indeks = 21 then /ce je indeks po visanju enak 21 pomeni da je zadnja meritev bila z indeksom 20, torej postavi indeks na 1, da bo naslednja meritev shranjena na indeks 1 in tako prepisala najstarejsi shranjen rezultat/
indeks = 1
endif |
Nisem poskusil simulirat, vendar se mi zdi da bi moralo priblizno delovati..? 
|
|
| Nazaj na vrh |
|
 |
eddie
Član
Pridružen-a: Sre 10 Dec 2003 21:02
Prispevkov: 723
Aktiv.: 3.04
Kraj: Severna primorska
|
| Objavljeno: Pon Feb 06, 2012 2:42 pm Naslov sporočila: |
|
|
Joj se opravičujem! 
Sem prehitro pogledal...
Bi kar lahko bilo ja.
lp
|
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Čet Sep 13, 2012 5:41 pm Naslov sporočila: |
|
|
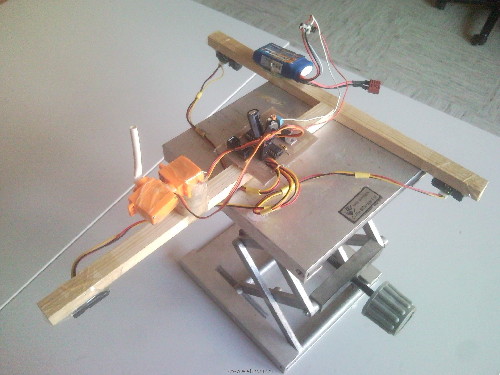
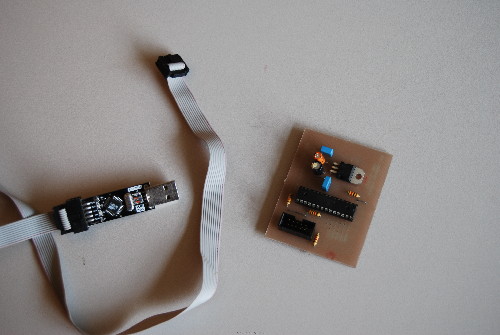
zadeva pocasi napreduje, zal pa je zaradi dolocenih zadev padla kar nekaj mest nizje po prioritetni lestvici.
Klinc, dva dni dela je za menoj. 
| Opis: |
|
| Velikost datoteke: |
362.8 KB |
| Pogledana: |
10 krat |
|
| Opis: |
|
| Velikost datoteke: |
3.67 MB |
| Pogledana: |
13 krat |
|
Nazadnje urejal/a zok Čet Apr 11, 2013 8:32 am; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
snow
Član

Pridružen-a: Tor 27 Dec 2005 14:02
Prispevkov: 341
Aktiv.: 1.44
Kraj: Ljubljana || Velenje
|
| Objavljeno: Pet Sep 14, 2012 10:36 am Naslov sporočila: |
|
|
Kombinacija žiroskopa in pospeškometra bi bila prava zadeva, če bi želel zadevo izdelati na takšen način. Pospeškometer ti da kot absolutno, ampak je občutljiv tudi na linearne pospeške in ni tako hiter kot žiroskop. Žiroskop ima hiter odziv (daje hitrost vrtenja), je neobčutljiv na pospeške, ampak sam ni primeren zaradi drifta.
Kombinacija teh dveh senzorjev (+ še digitalni kompas) se uporablja v kontrolerjih za quadkopterje, kot je na primer tale: http://abusemark.com/store/index.php?main_page=product_info&products_id=30. Poleg tega je koda za ta kontroler opensource.
Drugače pa ja, dva/tri sharpove IR senzorje pa bo kul. Tudi če bo cesta nagnjena  Na kakšnem ovalu za Nascar Na kakšnem ovalu za Nascar
|
|
| Nazaj na vrh |
|
|
SimonS
Član


Pridružen-a: Čet 01 Jul 2004 11:18
Prispevkov: 4770
Aktiv.: 20.08
Kraj: Kobarid
|
| Objavljeno: Pet Sep 14, 2012 11:35 am Naslov sporočila: |
|
|
Kaj pa ko se boš vzpenjal ali spuščal. Tudi to je dobro upoštevati
_________________
Lep dan
Simon |
|
| Nazaj na vrh |
|
|
zok
Član
Pridružen-a: Pet 02 Jan 2009 23:59
Prispevkov: 1115
Aktiv.: 5.55
Kraj: Ponikva
|
| Objavljeno: Pet Sep 14, 2012 1:23 pm Naslov sporočila: |
|
|
o tej varjanti ne razmisljam, saj bi me motilo pri vzpenjanju - krajsalo doseg svetlobnega snopa. Dokler luc sledi podlagi (in ob tem predpostavljamo da podlaga ni pretirano razgibana) mora ta varjanta zadostovati.
BMW-jev sistem (na K1600GT) za izracun nagiba uporablja ista tipala katera uporablja traction control. Kako tocno izgleda algoritem ki ga uporabljata oba sistema mi pa ni ravno kristalno jasno. pri avtomobilih zadevo popolnoma razumem, pri motociklih pa.. huh.. 
|
|
| Nazaj na vrh |
|
|
NeoTO
Član

Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.59
Kraj: Trzic
|
| Objavljeno: Pet Sep 14, 2012 1:59 pm Naslov sporočila: |
|
|
Če mene vprašaš, bi tole rešil samo z žiroskopom, saj imajo dandanes že kar nekako ugledne vrednosti lezenja. Če gledaš povprečje nagiba, bi le-to moralo biti skoraj 0 pri normalni vožnji (če se ne voziš v krogu...). Na izhod iz žiroskopa daš najprej analogni nizkopasovni filter, da se znebiš šuma ter en digitalni visokoprepustni filter (high-pass filter), ki odreže frekvence nižje od (npr.) 0.01 Hz. Izhod potem pelješ na motorje za uravnavanje snopa.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
vitez93
Član

Pridružen-a: Pet 19 Sep 2008 20:00
Prispevkov: 1018
Aktiv.: 4.98
Kraj: Celje- Dobrna
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 7 dni
Powered by phpBB © 2001, 2005 phpBB Group
|


