 |
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
noname
Član

Pridružen-a: Tor 28 Nov 2006 19:10
Prispevkov: 222
Aktiv.: 0.98
Kraj: Maribor
|
 Objavljeno: Pon Mar 19, 2007 8:00 pm Naslov sporočila: Objavljeno: Pon Mar 19, 2007 8:00 pm Naslov sporočila:  Robot Robot |
 |
|
Pozdravljeni ker sem se odločil za samogradnjo robota za tekmovanja , imam pa nekaj zadržkov. Zanima me kakšne IR ledice bi vi uporabili za senzorje ? Kajti doma sem že nekaj testiral IR senzor ki sem ga skonstruiral, vendar za sprednje senzorje ki robot ugotavlja kaj se pred njem nahaja nebodo dobri kajti ima prešibek signal. Za bočne senzorje bodo te ledice OK.
Kaj priporočate ?
LP 
|
|
| Nazaj na vrh |
|
 |
NeoTO
Član

Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.61
Kraj: Trzic
|
| Objavljeno: Pon Mar 19, 2007 8:05 pm Naslov sporočila: |
|
|
Kakšen robot? Kakšne LEDice? Kakšen domet? Daj malo več povej...
Si uporabil modulacijo svetlobe pri svojem senzorju?
Za najlažje On/Off senzorje uporabiš kar NE555 kot oscilator na 38kHz ter uporabiš sprejemnik, ki ima demudulator in filtre že vgrajene (TSOPxxxx in podobni). Če hočeš zraven še podatek o oddaljenosti, boš težko naredil sam karkoli uporabnega in raje kupi Sharpove senzorje, ki delujejo s pomočjo merjenja kota žarka odbite svetlobe in delujejo od nekaj cm do nekaj m.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
noname
Član
Pridružen-a: Tor 28 Nov 2006 19:10
Prispevkov: 222
Aktiv.: 0.98
Kraj: Maribor
|
| Objavljeno: Pon Mar 19, 2007 8:10 pm Naslov sporočila: |
|
|
Robot za tekmovanje,... pač mikrokontroler ... pa senzorji da se robot znajde v labirintu. Uporabljam ozkokotne IR LED diode na oddajnem delu , na sprejemne delu pa FOTO TRANZISTOR. Na ta način (način odboja žarka diode) pač mikrokontroler ugotavlja kolko stran od stranic labirinta se nahaja itd... vendar koliko sem testiral zadevo mi tak senzor do razdalije 20cm dela vredu dalje pa se že moti. Problem pa je pri tem da je labirint na tekmovanju lahko dolg tudi več. Npr da more en meter ravno peljati itd... 
To kaj si napisal z NE555 to imam nareto. Na sprejemnem delu pa OPAMP pa FILTER.
LP
|
|
| Nazaj na vrh |
|
|
Domenius
Član

Pridružen-a: Sre 30 Nov 2005 14:15
Prispevkov: 1188
Aktiv.: 5.01
Kraj: Medvode
|
| Objavljeno: Pon Mar 19, 2007 8:47 pm Naslov sporočila: |
|
|
Tekmovanje... tekmovanj z roboti je že kar nekaj. Evo, tukaj je link do tistega, za kar predvidevam da misliš.
_________________
It's electric! |
|
| Nazaj na vrh |
|
|
.
Član
Pridružen-a: Pon 23 Avg 2004 16:16
Prispevkov: 16777190
Aktiv.: 70802.60
|
| Objavljeno: Pon Mar 19, 2007 9:25 pm Naslov sporočila: |
|
|
| Brisana vsebina odstranjenega uporabnika.
|
|
| Nazaj na vrh |
|
|
S57OPA
Član
Pridružen-a: Ned 26 Okt 2003 17:36
Prispevkov: 10
Aktiv.: 0.04
Kraj: Zg. Savinjska dolina
|
| Objavljeno: Pon Mar 19, 2007 9:44 pm Naslov sporočila: |
|
|
Saj ni potrebe, da vidis do konca hodnika v labirintu. Robota pac sprogramiras tako, da začne zavijati, ko 5 cm pred sabo zagleda oviro. V primeru da pred sabo ne vidi ovire, se pač pelje na ravnost. Za tak nacin vožnje je verjetno dovolj dober tudi senzor, ki ga imas ti!
Kolikor mi je znano, deluje tako večina robotov na tem tekmovanju.
Lp, Matej
|
|
| Nazaj na vrh |
|
|
noname
Član
Pridružen-a: Tor 28 Nov 2006 19:10
Prispevkov: 222
Aktiv.: 0.98
Kraj: Maribor
|
| Objavljeno: Pon Mar 19, 2007 10:05 pm Naslov sporočila: |
|
|
| S57OPA je napisal/a: |
Saj ni potrebe, da vidis do konca hodnika v labirintu. Robota pac sprogramiras tako, da začne zavijati, ko 5 cm pred sabo zagleda oviro. V primeru da pred sabo ne vidi ovire, se pač pelje na ravnost. Za tak nacin vožnje je verjetno dovolj dober tudi senzor, ki ga imas ti!
Kolikor mi je znano, deluje tako večina robotov na tem tekmovanju.
Lp, Matej |
Joooj na to pa niti niti nisem najbol pomislil , bom stestiral ko bom imel dokončno sestavleno karoserijo robota z priterjenimi motorji in senzorji , da bom lahko testiral
|
|
| Nazaj na vrh |
|
|
rastamajks
Član
Pridružen-a: Čet 23 Mar 2006 13:03
Prispevkov: 105
Aktiv.: 0.45
Kraj: zalec
|
|
| Nazaj na vrh |
|
|
johan
Član
Pridružen-a: Čet 30 Nov 2006 18:18
Prispevkov: 11
Aktiv.: 0.05
|
| Objavljeno: Sre Mar 21, 2007 6:18 pm Naslov sporočila: |
|
|
Če govorimo o tekmovanju robotov v labirintu velja naslednje:
Roboti na takem tekmovanju navadno delujejo z najmanj dvema senzorjema. Teorija pravi da se iz labirinta pride vedno, če se držiš ene stene. Tako potrebujejo roboti senzor spredaj (zazna čelno oviro) in na eni strani (zazna steno ob kateri bo peljal).
Če zadene ob sprednjo oviro bo zavil v smer nasprotno od stranskega senzorja, dokler se ob novo steno ponovno ne poravna.
Če mu zmanjka stranske stene, bo zavil v tisto smer, kjer je senzor, da bo steno ponovno našel in se ob njej poravnal.
LP
|
|
| Nazaj na vrh |
|
|
noname
Član
Pridružen-a: Tor 28 Nov 2006 19:10
Prispevkov: 222
Aktiv.: 0.98
Kraj: Maribor
|
| Objavljeno: Sre Mar 21, 2007 7:56 pm Naslov sporočila: |
|
|
Zanima me kakasen motocontroler naj uporabim za motor ki porabi do 2A toka ? Ter da bi bilo cim ceneje.
mogoce kak univzalni cip ?
mogoce MOSFET tranzistorji ?
kaksne ideje...
LP
|
|
| Nazaj na vrh |
|
|
cfrik
Član

Pridružen-a: Sre 24 Jan 2007 16:15
Prispevkov: 39
Aktiv.: 0.17
Kraj: Trbovlje
|
| Objavljeno: Pet Mar 23, 2007 12:04 am Naslov sporočila: |
|
|
@noname
Če ne boš kompliciral z vzratno vožnjo, je najceneje če vzameš mikroprocesor s PWM izhodi (pr. Atmel Attiny2313) in en navaden bipolarni tranzistor kot je BD237. Na tak način boš njlažje kontroliral hitrost motorja. Če pa želiš več razdalj merjen, pa boš moral s procesorjem vklapljat različne predupora za IR LED, saj boš s tem spreminjal tok skozi diode in s tem tudi njihovo svetilnost.
Če paimaš v svojem kraju kakšoelektro šolo, pa skoraj sigurno tam deluje kak krožek za robotiko, kjer se dijaki pripravljajo na tekmovanje v ROBOLIGI 
_________________
lepo je imeti poklic in hobi na istem področju vendar je časa premalo |
|
| Nazaj na vrh |
|
|
trobida
Član

Pridružen-a: Ned 09 Jul 2006 12:13
Prispevkov: 1250
Aktiv.: 5.42
Kraj: Savinjska dolina-okolica Gornjega Grada
|
| Objavljeno: Pet Mar 23, 2007 7:55 am Naslov sporočila: |
|
|
| johan je napisal/a: |
Če govorimo o tekmovanju robotov v labirintu velja naslednje:
Roboti na takem tekmovanju navadno delujejo z najmanj dvema senzorjema. Teorija pravi da se iz labirinta pride vedno, če se držiš ene stene. Tako potrebujejo roboti senzor spredaj (zazna čelno oviro) in na eni strani (zazna steno ob kateri bo peljal).
Če zadene ob sprednjo oviro bo zavil v smer nasprotno od stranskega senzorja, dokler se ob novo steno ponovno ne poravna.
Če mu zmanjka stranske stene, bo zavil v tisto smer, kjer je senzor, da bo steno ponovno našel in se ob njej poravnal.
LP |
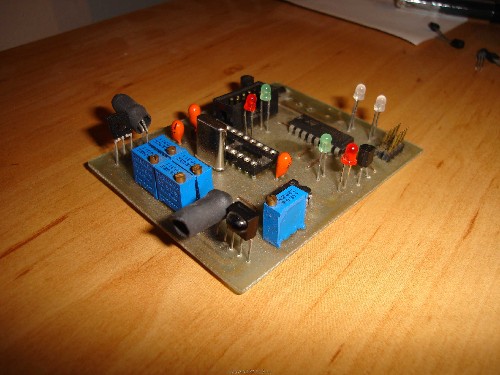
Se strinjam z Johanom. Takšnega sem pred leti tudi sam sestavljal. Prilagam slike nedokončanega vezja .
| Opis: |
|
| Velikost datoteke: |
325.85 KB |
| Pogledana: |
12 krat |

|
| Opis: |
|
| Velikost datoteke: |
295.36 KB |
| Pogledana: |
6 krat |
|
| Opis: |
|
| Velikost datoteke: |
283.99 KB |
| Pogledana: |
5 krat |

|
_________________
Lp
Tomaž, S57KO |
|
| Nazaj na vrh |
|
|
vilko
Član


Pridružen-a: Pet 13 Feb 2004 10:26
Prispevkov: 3361
Aktiv.: 14.18
Kraj: Dragomer
|
| Objavljeno: Pet Mar 23, 2007 9:09 am Naslov sporočila: Morda |
|
|
Morda bi bilo fajn slišati nekoga, ki je kaj takega že naredil, njegove izkušnje, zanke v katere je stopil in kako je stopil iz njih.
Ali obstoja kak forum, podoben temu, ki se ukvarja z robotiko?
'Slišal sem, pa sem pozabil.
Videl sem, in razumem.
Naredil sem in znam.'
To je moto, ki sem ga nekje slišal in mi je všeč.
Ko berem odgovore na forumu, so mi najbolj všeč tisti, katerih avtorji lahko rečejo tretje, (Bravo, Trobida!), če teh ni, potem avtorji, za katere velja drugo in šele na koncu odgovore ostalih avtorjev.
Pozdrav
|
|
| Nazaj na vrh |
|
|
cfrik
Član
Pridružen-a: Sre 24 Jan 2007 16:15
Prispevkov: 39
Aktiv.: 0.17
Kraj: Trbovlje
|
|
| Nazaj na vrh |
|
|
noname
Član
Pridružen-a: Tor 28 Nov 2006 19:10
Prispevkov: 222
Aktiv.: 0.98
Kraj: Maribor
|
| Objavljeno: Pet Mar 23, 2007 4:05 pm Naslov sporočila: |
|
|
| trobida je napisal/a: |
| johan je napisal/a: |
Če govorimo o tekmovanju robotov v labirintu velja naslednje:
Roboti na takem tekmovanju navadno delujejo z najmanj dvema senzorjema. Teorija pravi da se iz labirinta pride vedno, če se držiš ene stene. Tako potrebujejo roboti senzor spredaj (zazna čelno oviro) in na eni strani (zazna steno ob kateri bo peljal).
Če zadene ob sprednjo oviro bo zavil v smer nasprotno od stranskega senzorja, dokler se ob novo steno ponovno ne poravna.
Če mu zmanjka stranske stene, bo zavil v tisto smer, kjer je senzor, da bo steno ponovno našel in se ob njej poravnal.
LP |
Se strinjam z Johanom. Takšnega sem pred leti tudi sam sestavljal. Prilagam slike nedokončanega vezja . |
Heh to vezje mi je znano, popolnoma podobno imamo na soli (hodim v srednjo el. rac. solo mb) kit komplete ki so narejeni na enak nacin.
Bomo videli kako bomo naredli driverje za motorje, ker potrebujemo tudi vzvratnp voznjo
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 495 dni
Powered by phpBB © 2001, 2005 phpBB Group
|


