| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
wolf
Član

Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
 Objavljeno: Pon Feb 13, 2012 5:58 pm Naslov sporočila: Mobilni robot Objavljeno: Pon Feb 13, 2012 5:58 pm Naslov sporočila: Mobilni robot |
 |
|
Lotil bi se izdelovanja mobilnega robota kater bi zaznaval ovire in se jim odmikal. Nek načrt sem že zasledil na tem forumu, me pa zanima če pozna kdo še kakšen načrt, postopek o tem.
lp
|
|
| Nazaj na vrh |
|
 |
wolf
Član
Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
| Objavljeno: Tor Feb 14, 2012 5:09 pm Naslov sporočila: Re: Mobilni robot |
|
|
| Ni nobeden delal nič podobnega?
|
|
| Nazaj na vrh |
|
|
start
Član

Pridružen-a: Sob 06 Sep 2008 22:59
Prispevkov: 2392
Aktiv.: 11.71
Kraj: Eindhoven, Nizozemska
|
| Objavljeno: Tor Feb 14, 2012 5:24 pm Naslov sporočila: |
|
|
Ali bo robot voden preko komande ali bo kar brezglavo hodil na okoli?
Ce bo brezglavo (enostavneje), bi lahko imel eno IR LED diodo, katera bi oddajala pulze svetlobe, ko bi se svetloba odbila od predmeta v IR senzor (ki je poleg IR LED) ta zazna oviro in robot zavije.
Pogon robota lahko vzames servo motorje, katere predelas (plsticen zobnik v samem servotu predelas tako, da se bo servo lahko vrtel za celih 360°.
Problem pri IR bo ta, da ti robot ne bo zaznal crnega predmeta in bo trescil vanj (crna barva absorbira IR svetlobo).
Lahko pa vzames UZ (ultrazvocne) modul za zaznavanje razdalje. http://www.ebay.com/itm/New-Arduino-Ultrasonic-Module-HC-SR04-Distance-Sensor-/270755218294?pt=LH_DefaultDomain_0&hash=item3f0a44c376
Imas oddajni del in sprejemni (dve sivi skatlici), ista figa kot pri IR, zazna odboj.
Vendar gre tukaj za zvok. Oddajni del poslje zvok, sprejemni del pa stopa cas, ko se odbiti zvok vrne v modul.
Na podlagi frekvence in porabljenega casa ves na koliksni razdalji je robotek.
Ter samo dolocis na kateri razdalji se bo robotek obrnil.
_________________
Lep pozdrav!
Aljaž T. |
|
| Nazaj na vrh |
|
|
Branez
Moderator


Pridružen-a: Pon 14 Apr 2003 7:21
Prispevkov: 7831
Aktiv.: 33.06
Kraj: Koprivnica HR
|
| Objavljeno: Tor Feb 14, 2012 5:30 pm Naslov sporočila: Re: Mobilni robot |
|
|
| wolf je napisal/a: |
| Ni nobeden delal nič podobnega? |
Je!
_________________
The true sign of intelligence is not knowledge but imagination.
Creativity is intelligence having fun!
Albert Einstein |
|
| Nazaj na vrh |
|
|
Sibica
Član

Pridružen-a: Sob 02 Maj 2009 15:24
Prispevkov: 1097
Aktiv.: 5.59
Kraj: Vremska Dolina
|
| Objavljeno: Tor Feb 14, 2012 5:30 pm Naslov sporočila: |
|
|
| Citiram: |
| Oddajni del poslje zvok, sprejemni del pa stopa cas, ko se odbiti zvok vrne v modul. |
Mislim ultrazvočni merilnik deluje na princip doplerjevega efekta. Oddajnik odda neko frekvenco, sprejemnik pa izmeri sprejeto frekvenco. Iz teh dveh podatkov imeri razdaljo.
_________________
Slabih pilotov ni. So dobri ali pokojni. |
|
| Nazaj na vrh |
|
|
Branez
Moderator
Pridružen-a: Pon 14 Apr 2003 7:21
Prispevkov: 7831
Aktiv.: 33.06
Kraj: Koprivnica HR
|
| Objavljeno: Tor Feb 14, 2012 5:32 pm Naslov sporočila: |
|
|
Ne! Gori je Aljaž dobro napisal.
_________________
The true sign of intelligence is not knowledge but imagination.
Creativity is intelligence having fun!
Albert Einstein |
|
| Nazaj na vrh |
|
|
start
Član
Pridružen-a: Sob 06 Sep 2008 22:59
Prispevkov: 2392
Aktiv.: 11.71
Kraj: Eindhoven, Nizozemska
|
| Objavljeno: Tor Feb 14, 2012 5:38 pm Naslov sporočila: |
|
|
Sem si enkrat prebral Branetovo stran, pa sem si celo nekaj uspel zapomnit. 
_________________
Lep pozdrav!
Aljaž T.
Nazadnje urejal/a start Tor Feb 14, 2012 7:05 pm; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
gumby
Član

Pridružen-a: Sob 28 Apr 2007 12:32
Prispevkov: 4066
Aktiv.: 18.42
|
| Objavljeno: Tor Feb 14, 2012 6:29 pm Naslov sporočila: |
|
|
Doplerjev efekt se uporablja za merjenje hitrosti... zid je ponavadi na miru, zato bo sprejeta frekvenca enaka oddani 
_________________
Tule nisem več aktiven. |
|
| Nazaj na vrh |
|
|
Branez
Moderator
Pridružen-a: Pon 14 Apr 2003 7:21
Prispevkov: 7831
Aktiv.: 33.06
Kraj: Koprivnica HR
|
| Objavljeno: Tor Feb 14, 2012 6:30 pm Naslov sporočila: |
|
|
Se pa premika robot, ampak bi bilo težko imeriti to razliko v frekvencah.
_________________
The true sign of intelligence is not knowledge but imagination.
Creativity is intelligence having fun!
Albert Einstein |
|
| Nazaj na vrh |
|
|
wolf
Član
Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
| Objavljeno: Sob Feb 18, 2012 9:23 pm Naslov sporočila: |
|
|
| Kako se reče motorjem "100 RPM gear motors for high torque" v sloveščini in če jih je mogoče dobiti pri nas?
|
|
| Nazaj na vrh |
|
|
wolf
Član
Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
| Objavljeno: Ned Feb 19, 2012 5:49 pm Naslov sporočila: |
|
|
Katere servo motorje priporočate?
Nekak idejno glede robota sem si zamislil tako. Nek pogon z 2 servo motorjema ki bosta priključena na Freeduino( klon Arduinota, I think) ter IR sprejemnik z dalincem preko katerega bi robot upravljal. Verjetno bom moral dodati še manjšo testno ploščo na samo ohišhe, zaradi IR sprejemnika?
9V baterija bo napajala Freeduino, za 2 servo motorja bi pa rabil kaj?
Pišem pa ker me zanima če se to da izvesti tako, al sem kako neumnost povedu?
|
|
| Nazaj na vrh |
|
|
aly
Član

Pridružen-a: Tor 28 Sep 2004 14:51
Prispevkov: 9407
Aktiv.: 39.71
Kraj: Kranj - struževo
|
| Objavljeno: Ned Feb 19, 2012 6:12 pm Naslov sporočila: |
|
|
| wolf je napisal/a: |
| Kako se reče motorjem "100 RPM gear motors for high torque" v sloveščini in če jih je mogoče dobiti pri nas? |
navaden motor z reduktorjem.
_________________
I'm going to stand outside, so if anyone asks, I'm outstanding  |
|
| Nazaj na vrh |
|
|
wolf
Član
Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
| Objavljeno: Čet Mar 29, 2012 5:42 pm Naslov sporočila: |
|
|
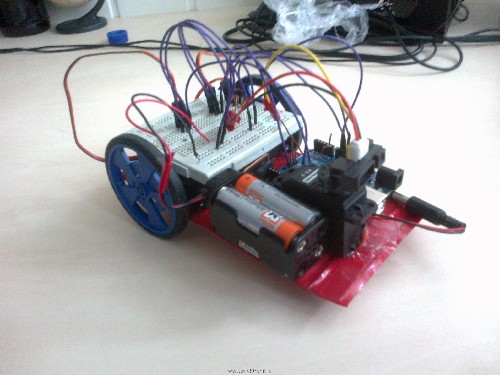
No, robot je dokončan.
Uporabil sem naslednje stvari:
Arduino Uno
2 servo motorja( neskončno vrtenje)
1 servo motor(klasičen)
9v baterijo ter priključek za napajanje iz baterije na Arduinota
vložek za 4 AA baterije, napajanje 2 servo motorja
Ir senzord Sharp GP2Y0A21YK
manjši protoboard
2 kolesa kompatibilna z servo motroji
monokolo za robote
vezice
Ir senzor je šel na glavo okrogle ploščice priterjene na servo motro( klasičen) in je postavljen na 90 stopinj, ter se ob zaznavi predmeta obrne najprej na desno do 180 stopinj ter nazaj do 90 ter do 0 stopinj. Glede na povratne informacije se odloči za najbolj "optimalno" pot v danem trenutku.
Če koga zanima koda mi lahko piše na zs. Slikce pa krajši posnetek bosta pa prišla, če bo kdo sploh zainteresiran

|
|
| Nazaj na vrh |
|
|
start
Član
Pridružen-a: Sob 06 Sep 2008 22:59
Prispevkov: 2392
Aktiv.: 11.71
Kraj: Eindhoven, Nizozemska
|
| Objavljeno: Čet Mar 29, 2012 5:56 pm Naslov sporočila: |
|
|
Seveda!
Kar slikice.
_________________
Lep pozdrav!
Aljaž T. |
|
| Nazaj na vrh |
|
|
wolf
Član
Pridružen-a: Pet 28 Okt 2011 21:49
Prispevkov: 20
Aktiv.: 0.12
Kraj: Ljubljana
|
| Objavljeno: Ned Apr 01, 2012 8:20 pm Naslov sporočila: |
|
|
Slika robota
| Opis: |
|
| Velikost datoteke: |
1004.61 KB |
| Pogledana: |
10 krat |
|
Nazadnje urejal/a wolf Ned Apr 01, 2012 8:36 pm; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
|


