|
www.elektronik.si
Forum o elektrotehniki in računalništvu
|
| Poglej prejšnjo temo :: Poglej naslednjo temo |
| Avtor |
Sporočilo |
Vinkel
Član


Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
 Objavljeno: Sob Jul 11, 2009 8:29 pm Naslov sporočila: PID regulacija - podrobno Objavljeno: Sob Jul 11, 2009 8:29 pm Naslov sporočila: PID regulacija - podrobno |
 |
|
| SimonS je napisal/a: |
| Sedaj imam že napisano PID regulacijo, ki jo še testiram. Mogoče kdo ve za primerek "samonastavlive" PID regulacije? To mislim, da se PID sam uči in sam izbere najbolj optimalne parametre? To bi bil zelo hvaležen!! |
Ali pride tu v upoštev Ziegler Nicholsova metoda ali se v praksi v splošnem uporablja kaj kompleksnejšega?
|
|
| Nazaj na vrh |
|
 |
NeoTO
Član

Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.61
Kraj: Trzic
|
| Objavljeno: Sob Jul 11, 2009 8:43 pm Naslov sporočila: |
|
|
| Vinkel je napisal/a: |
| SimonS je napisal/a: |
| Mogoče kdo ve za primerek "samonastavlive" PID regulacije? |
Ali pride tu v upoštev Ziegler Nicholsova metoda ali se v praksi v splošnem uporablja kaj kompleksnejšega? |
Ziegler-Nichols je v primerjavi z nekaterimi novejšimi algoritmi prav smešno zadaj. Teorij in različnih realizacij teh novih algoritmov pa je veliko, vsak avtor pa zagovarja svojega.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
Vinkel
Član
Pridružen-a: Čet 15 Maj 2008 16:55
Prispevkov: 237
Aktiv.: 1.14
Kraj: Ljubljana
|
| Objavljeno: Sob Jul 11, 2009 8:50 pm Naslov sporočila: |
|
|
| So te moderne metode splošno znane ali so to poslovne skrivnosti podjetij, ki izdelujejo industrijske PID krmilnike ?
|
|
| Nazaj na vrh |
|
|
SimonS
Član


Pridružen-a: Čet 01 Jul 2004 11:18
Prispevkov: 4769
Aktiv.: 20.12
Kraj: Kobarid
|
| Objavljeno: Ned Jul 12, 2009 10:06 am Naslov sporočila: |
|
|
| NeoTO je napisal/a: |
Ziegler-Nichols je v primerjavi z nekaterimi novejšimi algoritmi prav smešno zadaj. Teorij in različnih realizacij teh novih algoritmov pa je veliko, vsak avtor pa zagovarja svojega. |
Na netu sem našel veliko teorije, ampak nikjer pa ni detajlno napisano, kako bi to lahko realiziral v praksi. Prav zato sprašujem, če je kdo že delal z tem, oz. pozna kakšen dober link na to temo...
_________________
Lep dan
Simon |
|
| Nazaj na vrh |
|
|
NeoTO
Član
Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.61
Kraj: Trzic
|
| Objavljeno: Pon Jul 13, 2009 10:28 am Naslov sporočila: |
|
|
| Vinkel je napisal/a: |
| So te moderne metode splošno znane ali so to poslovne skrivnosti podjetij, ki izdelujejo industrijske PID krmilnike ? |
Na primerih, na katerih sem testiral, se je veliko bolje od Ziegler Nicholsa obnesla Chien-Hrones-Roswick metoda določanja koeficientov, najbolje pa metoda površin, ki jo razvijajo na IJS-u.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
GJ
Član

Pridružen-a: Čet 02 Nov 2006 15:51
Prispevkov: 946
Aktiv.: 4.17
Kraj: Ljubljana
|
| Objavljeno: Pon Jul 13, 2009 10:16 pm Naslov sporočila: |
|
|
| SimonS je napisal/a: |
| Na netu sem našel veliko teorije, ampak nikjer pa ni detajlno napisano, kako bi to lahko realiziral v praksi. Prav zato sprašujem, če je kdo že delal z tem, oz. pozna kakšen dober link na to temo... |
He, he..

Če obladaš teorijo potem ni problema!
Spišeš PID regulator in narediš simulacijo, vsaj tako sem jaz začel!
P regulator je zgolj ena vrstica:
| Koda: |
| Output = PPoint + (No - Input) / Xp |
Enako velja za I del..
| Koda: |
| PPoint = PPoint + (No-Input) / Xp / ITime |
Pri D-ju je stvar podobna le, da ti ojačanje predstavlja sprememba regulirane veličine po času!
Dober PID regulator ni kar tako!
Predvsem moraš razumeti regulacijo!
In važno je, da ločiš katero teorijo bereš, imaš Ameriško in Nemško, termini so različni.
Na samoadaptivnost pa za začetek raje pozabite!
Veliko uspeha...
LP GJ
|
|
| Nazaj na vrh |
|
|
Sokrat
Član
Pridružen-a: Čet 25 Avg 2005 11:00
Prispevkov: 5584
Aktiv.: 23.56
|
| Objavljeno: Tor Jul 14, 2009 12:59 am Naslov sporočila: |
|
|
| GJ je napisal/a: |
Na samoadaptivnost pa za začetek raje pozabite!
|
Bi se lahko kdo morda malce obsirneje razpisal o tem (par odstavkov) ?
Kaj se sploh lahko samo od sebe prilagaja, ce moras tako ali tako nastaviti v kaksno stanje in kako naj zadeva pride - v tem primeru bi bilo vseeno, ce bi po isti metodi (s poizkusanjem) sam natsavil parametre ? 
_________________
Ka ti bo pa torba ce si kupu kolo ? |
|
| Nazaj na vrh |
|
|
NeoTO
Član
Pridružen-a: Pon 28 Mar 2005 19:19
Prispevkov: 2752
Aktiv.: 11.61
Kraj: Trzic
|
| Objavljeno: Tor Jul 14, 2009 8:08 am Naslov sporočila: |
|
|
Treba je ločiti med samonastavljivimi in samoadaptivnimi regulatorji. Prvi se nastavijo sami enkrat ob zagonu in se potem parametri ne spreminjajo. Takrat regulator pač pošlje ven nek signal ter glede na odziv v svojih tabelah poišče ustrezne parametre.
Adaptivni regulatorji pa identificirajo sistem ves čas in gradijo model sistema. Iz modela sistema pa se potem izračunajo najbolj primerne parametre. Takšni regulatorji pa delujejo dobro le, če se regulirana veličina spreminja. Če je izhodni signal 'reven', identifikacije ne more delovati dobro. Seveda pa potrebujejo stabilne začetne parametre, da sploh zadeva začne delovat.
Toliko bolj na hitro.
_________________
Lp,
Matevž |
|
| Nazaj na vrh |
|
|
.
Član
Pridružen-a: Pon 23 Avg 2004 16:16
Prispevkov: 16777190
Aktiv.: 70773.50
|
| Objavljeno: Tor Jul 14, 2009 8:53 am Naslov sporočila: |
|
|
| Brisana vsebina odstranjenega uporabnika.
|
|
| Nazaj na vrh |
|
|
GJ
Član
Pridružen-a: Čet 02 Nov 2006 15:51
Prispevkov: 946
Aktiv.: 4.17
Kraj: Ljubljana
|
| Objavljeno: Tor Jul 14, 2009 12:34 pm Naslov sporočila: |
|
|
| Sokrat je napisal/a: |
| Kaj se sploh lahko samo od sebe prilagaja, ce moras tako ali tako nastaviti v kaksno stanje in kako naj zadeva pride - v tem primeru bi bilo vseeno, ce bi po isti metodi (s poizkusanjem) sam natsavil parametre ? |
Govorimo seveda o programiranju v KRT (krmilno regulacijski tehniki)… 
Torej s pisanjem algoritma PID regulatorja in algoritmov samoadaptivnosti.
Res na hitro…
Jasno ti mora biti še marsikaj drugega.
Najprej s kakšno regulacijo se ukvarjaš! Vedeti moraš vsaj koliko pomembnih motilnih dejavnikov imaš.
Če imaš le en vpliven motilni dejavnik, potem ni težko nastaviti regulatorja, obstajajo formule, ki ti pri tem pomagajo. Seveda pa moraš vedeti/izmeriti odzivnost sistema, ki ga krmiliš.
Če se ukvarjaš s hitrimi procesi potem moraš vedeti kje so meje odzivnosti regulacije. Na to vpliva: odzivnost tipal, odzivnost izvršnih organov, regulacijsko razmerje izvršnih organov, razne fizikalne lastnosti kot so toplotna prevodnost, toplotna vztrajnost itd. Skratka, jasna ti mora biti tudi vsa fizika, ki tiči v ozadju reguliranega procesa.
…
Samoadaprivnost:
Obstaja več metod samoadaptivnosti, ampak preden se začneš ukvarjati z njo si moraš pridobiti poleg teorije še nekaj izkušenj, vsaj dobro programsko simulacijo moraš narediti. Z dobro simulacijo si rešiš/prihraniš veliko problemov. Včasih so računali simulacije na roke ali pa so naredili simulacijo iz RLC elementov, danes pa to narediš brez problema v nekem programskem jeziku.
…
Primerček:
Recimo, da ne želiš, da trosiš svoj dragoceni čas z merjenjem odzivnosti sistema in ti za to poskrbi en del tvoje programske kode. Ponavadi prilagajaš kar ojačanje, oziroma Xp (proporcionalno območje regulatorja), seveda znotraj nekih smiselnih meja! Kako spreminjaš ta faktor, je seveda stvar tvojega programskega algoritma. Recimo, da je tvoj programski algoritem sposoben slediti kako se neka motnja v procesu regulacije odvija/niha. Če program zazna, da je odzivnost sistema preslaba, potem poveča ojačanje za nek faktor, če pa ugotovi prenihanje pa ustrezno zmanjša ojačanje.
LP GJ
Nazadnje urejal/a GJ Tor Jul 14, 2009 12:40 pm; skupaj popravljeno 1 krat |
|
| Nazaj na vrh |
|
|
SimonS
Član
Pridružen-a: Čet 01 Jul 2004 11:18
Prispevkov: 4769
Aktiv.: 20.12
Kraj: Kobarid
|
| Objavljeno: Tor Jul 14, 2009 12:39 pm Naslov sporočila: |
|
|
Uh, ja vidim, da ne bo ravno tako enostavno, kot sem si zamislil.
No hvala za vso pomoč grem malo študirat zadeve.
_________________
Lep dan
Simon |
|
| Nazaj na vrh |
|
|
Pikec
Član
Pridružen-a: Ned 13 Apr 2008 19:56
Prispevkov: 28
Aktiv.: 0.13
Kraj: Hrastnik
|
|
| Nazaj na vrh |
|
|
psevdonim
Član

Pridružen-a: Čet 21 Sep 2006 21:42
Prispevkov: 3406
Aktiv.: 14.92
Kraj: slo
|
| Objavljeno: Sob Mar 20, 2010 10:35 pm Naslov sporočila: |
|
|
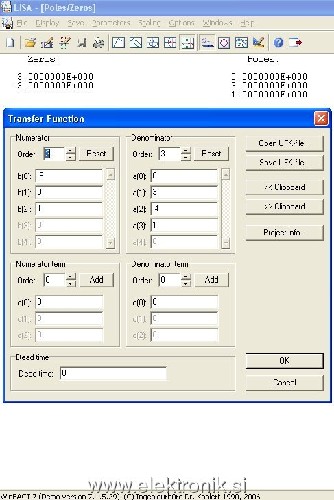
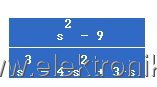
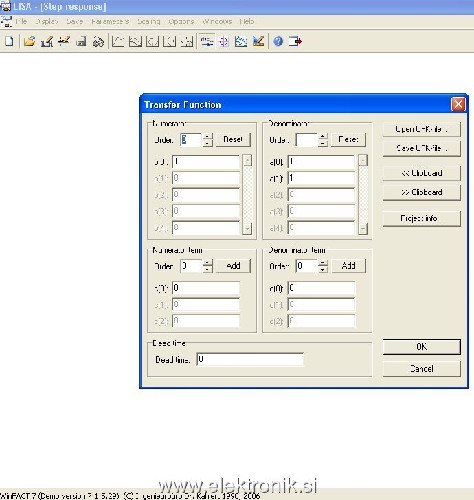
kako se enačba na sliki vpiše v Liso ?
Ničle morajo biti 3 in -3, poli pa 0, 3 in 1 .
Vem, da je numerator števec, denominator pa imenovalec, naprej pa mi zmanjka 
| Opis: |
| spodaj piše S^3 - 4S^2 + 3S |
|
| Velikost datoteke: |
2.59 KB |
| Pogledana: |
10840 krat |
|
| Opis: |
|
| Velikost datoteke: |
60.93 KB |
| Pogledana: |
13 krat |
|
|
|
| Nazaj na vrh |
|
|
psevdonim
Član
Pridružen-a: Čet 21 Sep 2006 21:42
Prispevkov: 3406
Aktiv.: 14.92
Kraj: slo
|
|
| Nazaj na vrh |
|
|
psevdonim
Član
Pridružen-a: Čet 21 Sep 2006 21:42
Prispevkov: 3406
Aktiv.: 14.92
Kraj: slo
|
| Objavljeno: Ned Mar 21, 2010 1:32 am Naslov sporočila: |
|
|
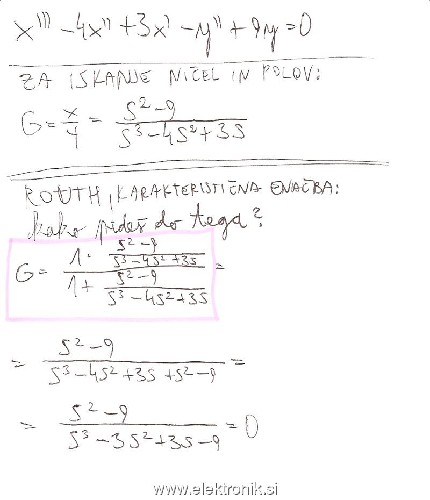
recimo da mi je jasno, kako smo prišli do enačbe za izračun ničel in polov.
Kako pa prideš do karakteristične enačbe za oceno stabilnosti s pomočjo Routhovega kriterija, okvirjeno z rdečo ?
Npr. od kod se pojavi 1* v števcu in 1+ v imenovalcu ? Ali to velja na splošno - kjerkoli naletiš na tako stvar, pač napišeš dvojni ulomek, kjer daš zgoraj ena krat, spodaj pa ena plus ?
| Opis: |
|
| Velikost datoteke: |
68.24 KB |
| Pogledana: |
5 krat |
|
|
|
| Nazaj na vrh |
|
|
|
|
Ne, ne moreš dodajati novih tem v tem forumu
Ne, ne moreš odgovarjati na teme v tem forumu
Ne, ne moreš urejati svojih prispevkov v tem forumu
Ne, ne moreš brisati svojih prispevkov v tem forumu
Ne ne moreš glasovati v anketi v tem forumu
Ne, ne moreš pripeti datotek v tem forumu
Ne, ne moreš povleči datotek v tem forumu
|
Uptime: 498 dni
Powered by phpBB © 2001, 2005 phpBB Group
|